SELECTED PUBLICATIONS
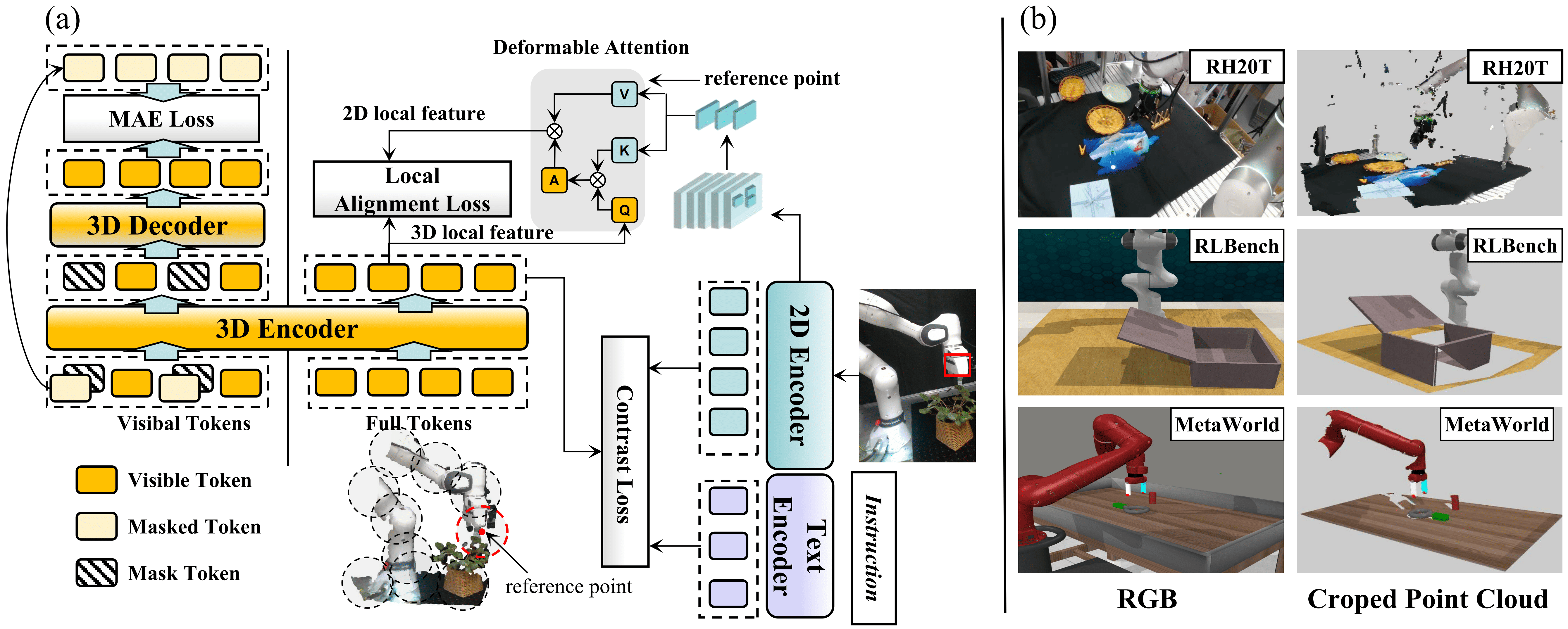
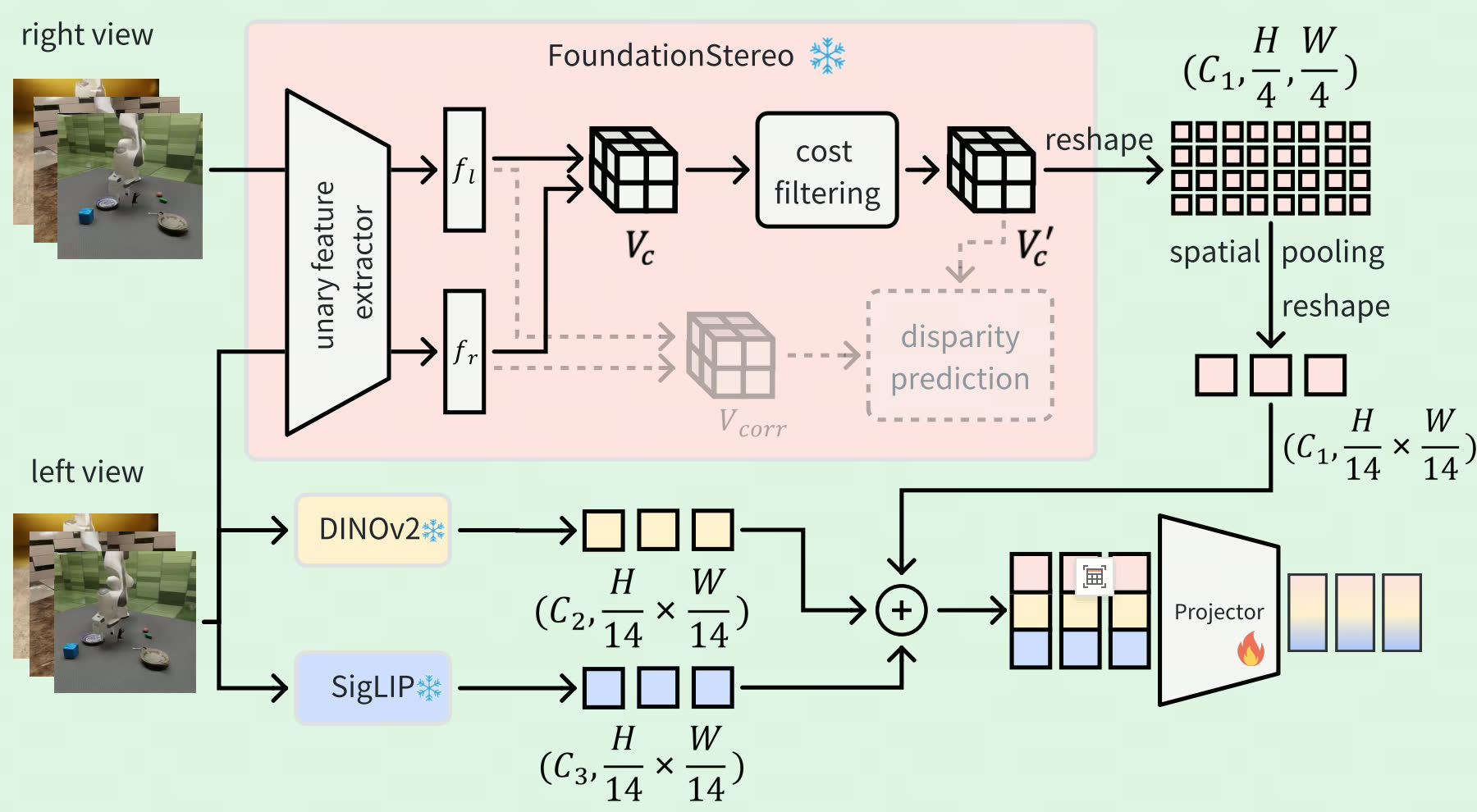
CLAR: Learning 3D Representations for Robotic Manipulation by Fusing Masked Reconstruction with Multi-Level Contrastive Alignment
Wenbo Cui*, Chengyang Zhao*, Yuhui Chen, Haoran Li, Zhizheng Zhang, Dongbin Zhao,
He Wang†
ICRA 2026
bibtex: @article{cui2025cl3r,
title={CL3R: 3D reconstruction and contrastive learning for enhanced robotic manipulation representations},
author={Cui, Wenbo and Zhao, Chengyang and Chen, Yuhui and Li, Haoran and Zhang, Zhizheng and Zhao, Dongbin and Wang, He},
journal={arXiv preprint arXiv:2507.08262},
year={2025}
}
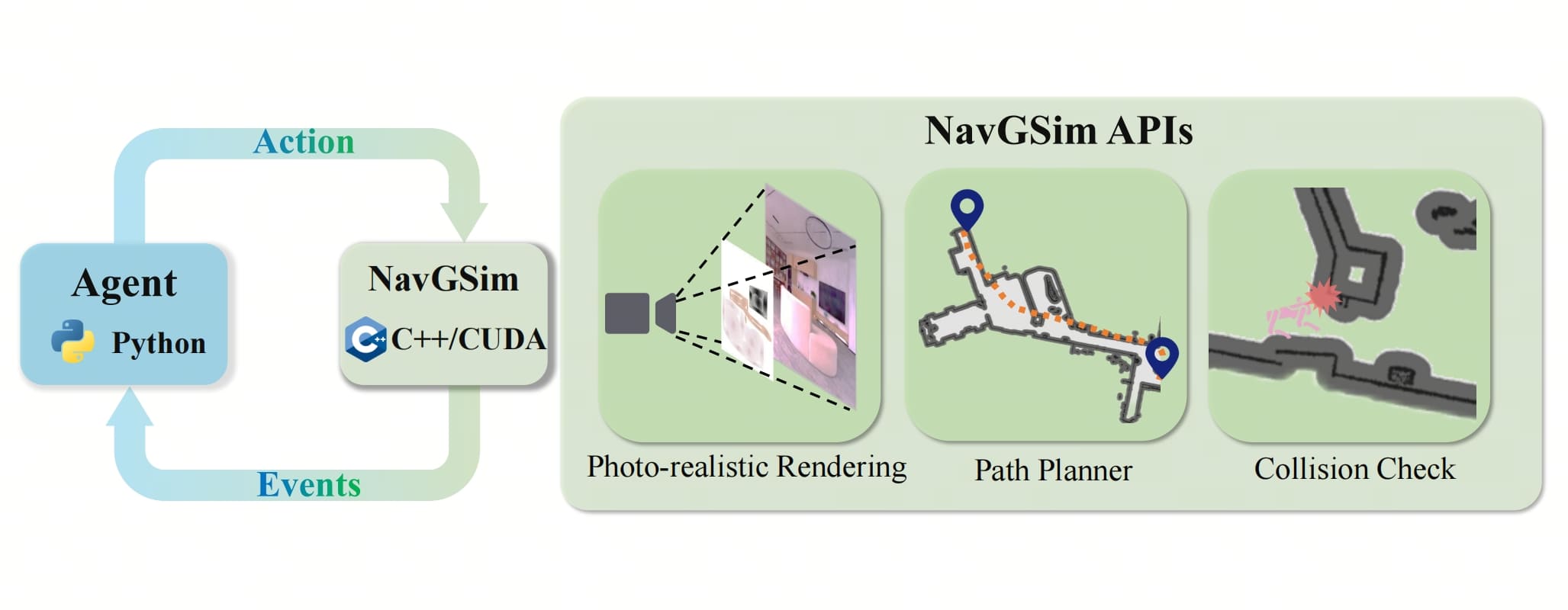
NavGSim: High-Fidelity Gaussian Splatting Simulator for Large-Scale Navigation
Jiahang Liu*, Yuanxing Duan*, Jiazhao Zhang*, Minghan Li, Shaoan Wang, Zhizheng Zhang†,
He Wang†
ICRA 2026
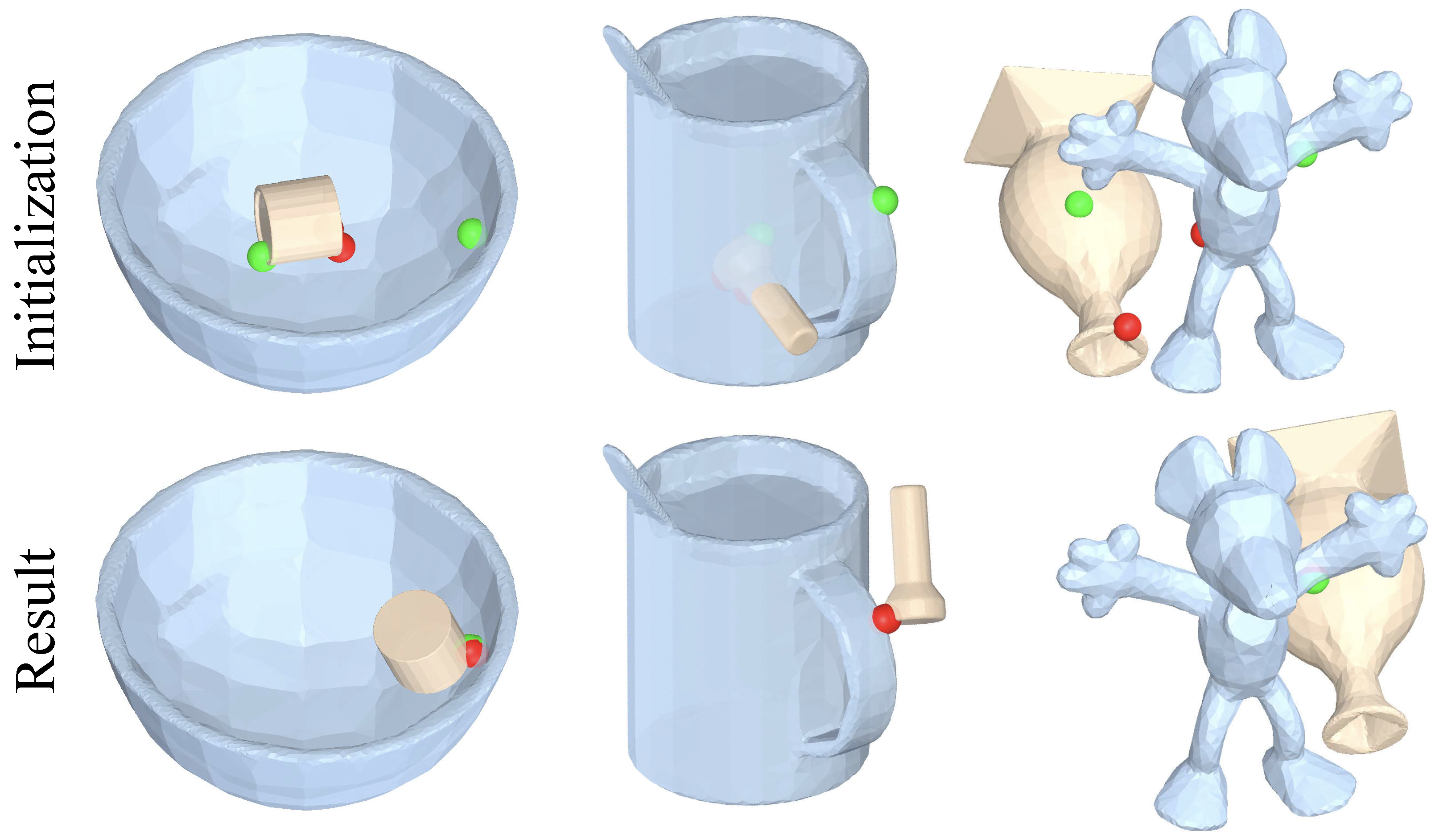
Robust Differentiable Collision Detection for General Objects
Jiayi Chen, Wei Zhao, Liangwang Ruan, Baoquan Chen,
He Wang†
ICRA 2026
@article{chen2025robust,
title={Robust Differentiable Collision Detection for General Objects},
author={Chen, Jiayi and Zhao, Wei and Ruan, Liangwang and Chen, Baoquan and Wang, He},
journal={arXiv preprint arXiv:2511.06267},
year={2025}
}

UrbanVLA: A Vision-Language-Action Model for Urban Micromobility
Anqi Li*, Zhiyong Wang*, Jiazhao Zhang*, Minghan Li, Zhibo Chen,
Zhizheng Zhang†,
He Wang†
ICRA 2026
@article{li2025urbanvla,
title={UrbanVLA: A Vision-Language-Action Model for Urban Micromobility},
author={Li, Anqi and Wang, Zhiyong and Zhang, Jiazhao and Li, Minghan and Qi, Yunpeng and Chen, Zhibo and Zhang, Zhizheng and Wang, He},
journal={arXiv preprint arXiv:2510.23576},
year={2025}
}
TrackVLA++: Unleashing Reasoning and Memory Capabilities in VLA
Models for Embodied Visual Tracking
Jiahang Liu*, Yunpeng Qi*, Jiazhao Zhang*, Minghan Li, Shaoan
Wang, Kui Wu, Hanjing Ye, Hong Zhang, Zhibo Chen, Fangwei Zhong,
Zhizheng Zhang†,
He Wang†
ICRA 2026
@article{2025TrackVLA,
title={TrackVLA++: Unleashing Reasoning and Memory Capabilities in VLA Models for Embodied Visual Tracking},
author={ Liu, Jiahang and Qi, Yunpeng and Zhang, Jiazhao and Li, Minghan and Wang, Shaoan and
Wu, Kui and Ye, Hanjing and Zhang, Hong and Chen, Zhibo and Zhong, Fangwei },
year={2025},
}

Track Any Motions under Any Disturbances
Zhikai Zhang*, Jun Guo*, Chao Chen, Jilong Wang, Chenghuai Lin,
Yunrui Lian, HanXue, Zhenrong Wang, Maoqi Liu, Jiangran Lyu,
Huaping Liu, He Wang, Li Yi†
ICRA 2026
@misc{zhang2025trackmotionsdisturbances,
title={Track Any Motions under Any Disturbances},
author={Zhikai Zhang and Jun Guo and Chao Chen and Jilong Wang and Chenghuai Lin and Yunrui Lian and
Han Xue and Zhenrong Wang and Maoqi Liu and Jiangran Lyu and Huaping Liu and He Wang and Li Yi},
year={2025},
eprint={2509.13833},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2509.13833},
}
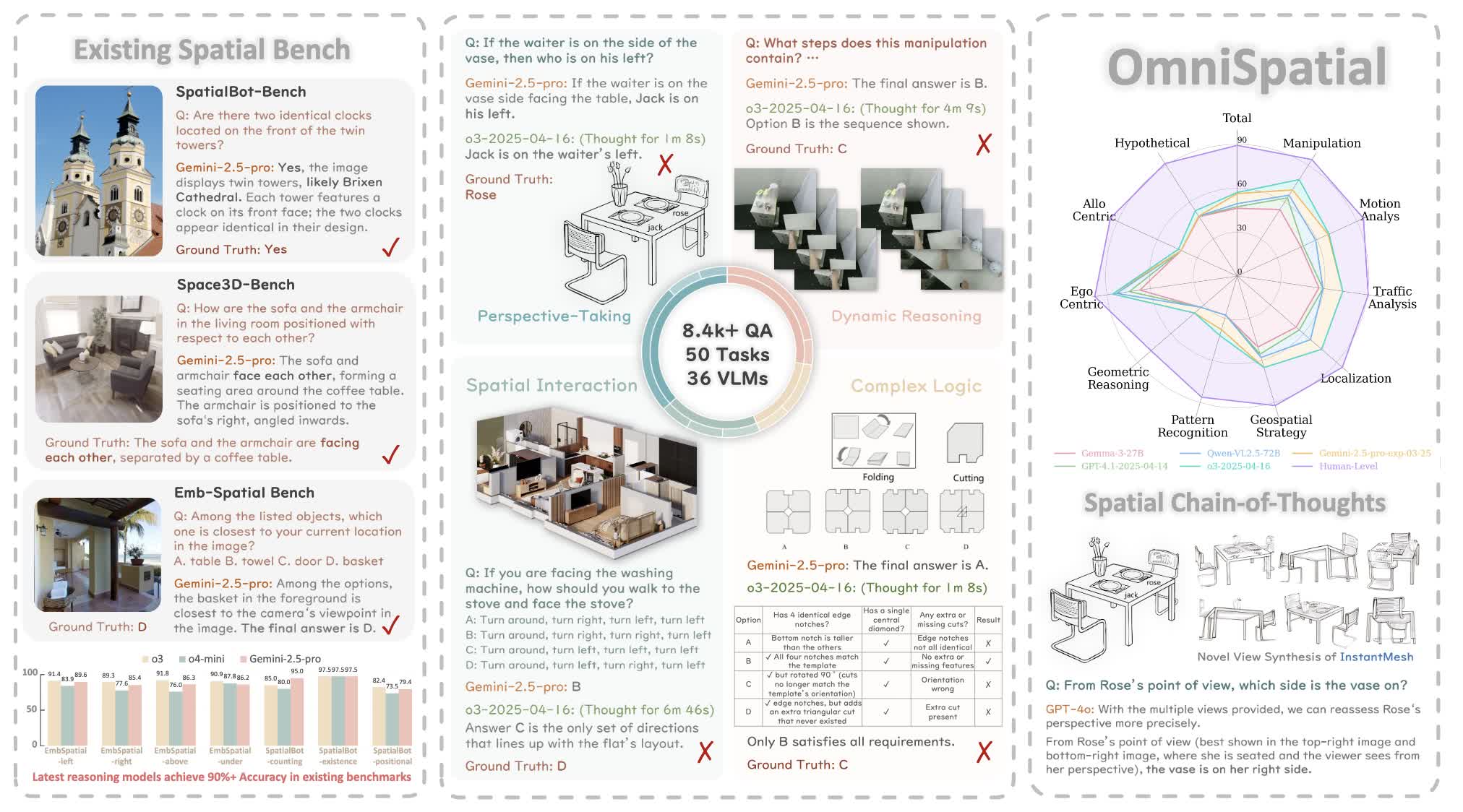
OmniSpatial: Towards Comprehensive Spatial Reasoning Benchmark
for Vision Language Models
Mengdi Jia*, Zekun Qi*, Shaochen Zhang, Wenyao Zhang, Xinqiang
Yu, Jiawei He, He Wang†, Li Yi†
ICLR 2026
@article{omnispatial25,
title={OmniSpatial: Towards Comprehensive Spatial Reasoning Benchmark for Vision Language Models},
author={Jia, Mengdi and Qi, Zekun and Zhang, Shaochen and Zhang, Wenyao and Yu, Xinqiang and He, Jiawei and Wang, He and Yi, Li},
journal={arXiv preprint arXiv:2506.03135},
year={2025}
}
Embodied Navigation Foundation Model
Jiazhao Zhang*, Anqi Li*, Yunpeng Qi*, Minghan Li*, Jiahang Liu,
Shaoan Wang, Haoran Liu, Gengze Zhou, Yuze Wu, Xingxing Li,
Yuxin Fan, Wenjun Li, Zhibo Chen, Fei Gao, Qi Wu, Zhizheng
Zhang†, He Wang†
ICLR 2026
@article{zhang2025embodied,
title={Embodied navigation foundation model},
author={Zhang, Jiazhao and Li, Anqi and Qi, Yunpeng and Li, Minghan and Liu, Jiahang and
Wang, Shaoan and Liu, Haoran and Zhou, Gengze and Wu, Yuze and Li, Xingxing and others},
journal={arXiv preprint arXiv:2509.12129},
year={2025}
}


DexNDM: Closing the Reality Gap for Dexterous In-Hand Rotation
via Joint-Wise Neural Dynamics Model
Xueyi Liu, He Wang, Li Yi†
ICLR 2026
@article{2025DexNDM,
title={DexNDM: Closing the Reality Gap for Dexterous In-Hand Rotation via Joint-Wise Neural Dynamics Model},
author={ Liu, Xueyi and Wang, He and Yi, Li },
year={2025},
}

FoldNet: Learning Generalizable Closed-Loop Policy for Garment
Folding via Keypoint-Driven Asset and Demonstration Synthesis
Yuxing Chen*, Bowen Xiao*, He Wang†
RA-L
@misc{chen2025foldnetlearninggeneralizableclosedloop,
author={Chen, Yuxing and Xiao, Bowen and Wang, He},
journal={IEEE Robotics and Automation Letters},
title={FoldNet: Learning Generalizable Closed-Loop Policy for Garment Folding via Keypoint-Driven Asset and Demonstration Synthesis},
year={2026},
volume={},
number={},
pages={1-8},
keywords={Clothing;Geometry;Imitation learning;Annotations;Trajectory;Training;Synthetic data;Pipelines;Grasping;Filtering;
Bimanual manipulation;deep learning for visual perception;deep learning in grasping and manipulation},
doi={10.1109/LRA.2026.3656770}}
}
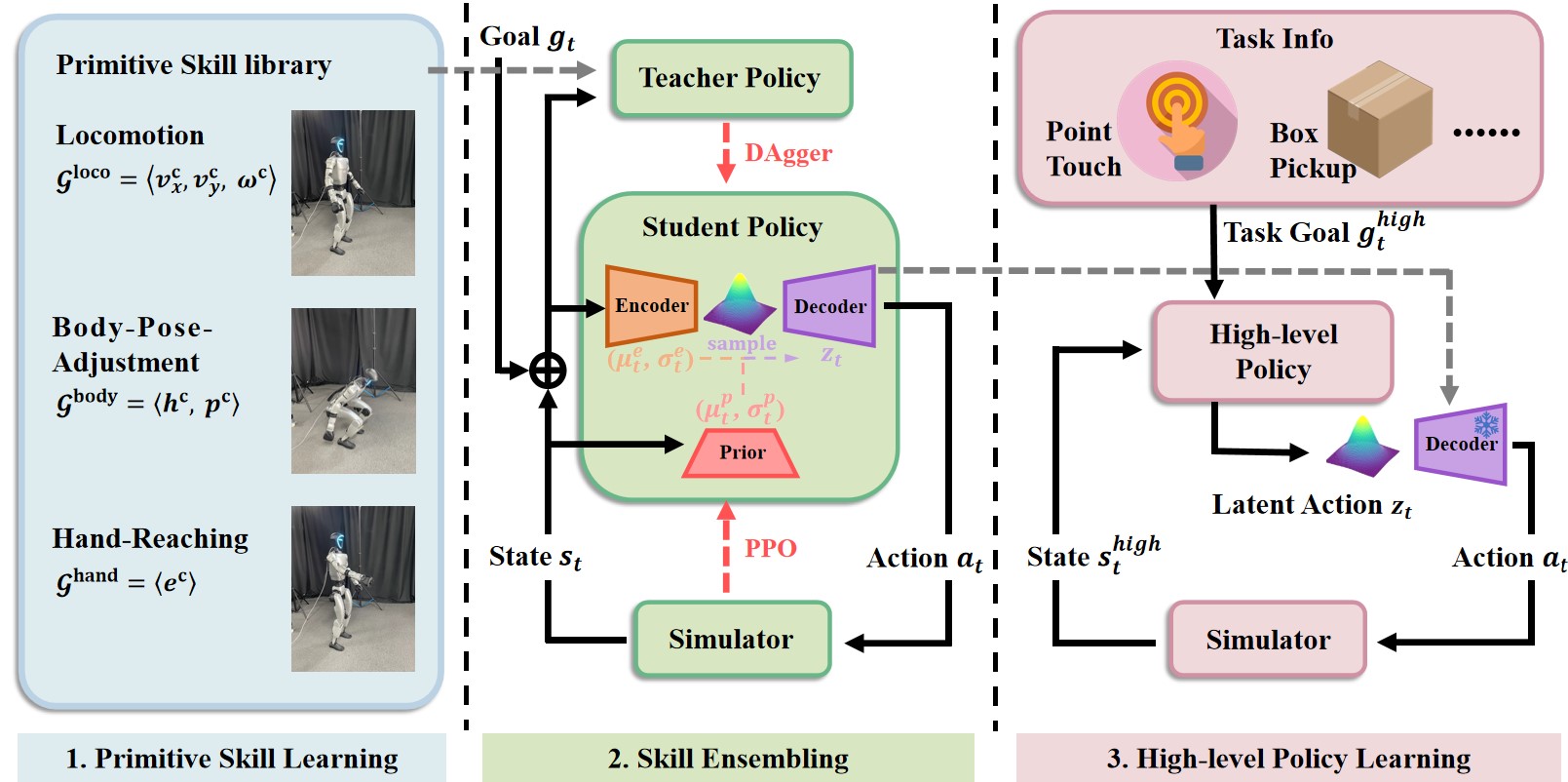
Unleashing Humanoid Reaching Potential via Real-world-Ready
Skill Space
Zhikai Zhang*, Chao Chen*, Han Xue*, Jilong Wang, Sikai Liang,
Yun Liu, Zongzhang Zhang, He Wang, Li Yi†
RA-L
@article{DBLP:journals/corr/abs-2505-10918,
author= {Zhikai Zhang and
Chao Chen and
Han Xue and
Jilong Wang and
Sikai Liang and
Yun Liu and
Zongzhang Zhang and
He Wang and
Li Yi},
title= {Unleashing Humanoid Reaching Potential via Real-world-Ready Skill
Space},
journal= {CoRR},
volume= {abs/2505.10918},
year= {2025},
url= {https://doi.org/10.48550/arXiv.2505.10918},
doi= {10.48550/ARXIV.2505.10918},
eprinttype= {arXiv},
eprint= {2505.10918},
timestamp= {Sun, 29 Jun 2025 10:28:00 +0200},
biburl= {https://dblp.org/rec/journals/corr/abs-2505-10918.bib},
bibsource= {dblp computer science bibliography, https://dblp.org}
}
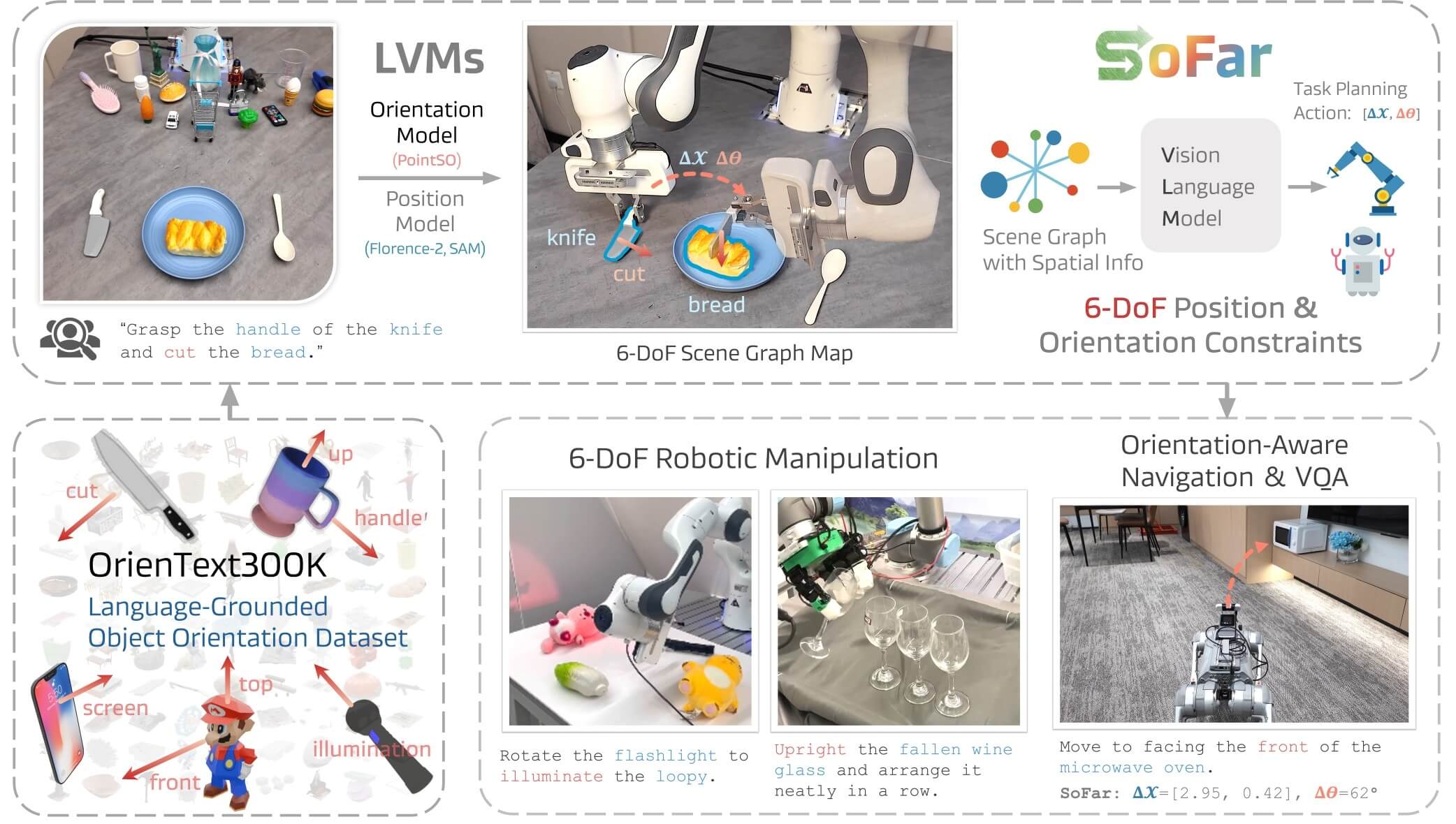
SoFar: Language-Grounded Orientation Bridges Spatial Reasoning
and Object Manipulation
Zekun Qi*, Wenyao Zhang*, Yufei Ding*, Runpei Dong, XinQiang Yu,
Jingwen Li, Lingyun Xu, Baoyu Li, Xialin He, Guofan Fan, Jiazhao
Zhang, Jiawei He, Jiayuan Gu, Xin Jin, Kaisheng Ma, Zhizheng
Zhang†, He Wang†, Li Yi†
NeurIPS 2025 (spotlight)
bibtex: @article{sofar25,
title={Sofar: Language-grounded orientation bridges spatial reasoning and object manipulation},
author={Qi, Zekun and Zhang, Wenyao and Ding, Yufei and Dong, Runpei and Yu, Xinqiang and Li, Jingwen and Xu, Lingyun and Li, Baoyu and He, Xialin and Fan, Guofan and others},
journal={arXiv preprint arXiv:2502.13143},
year={2025}
}
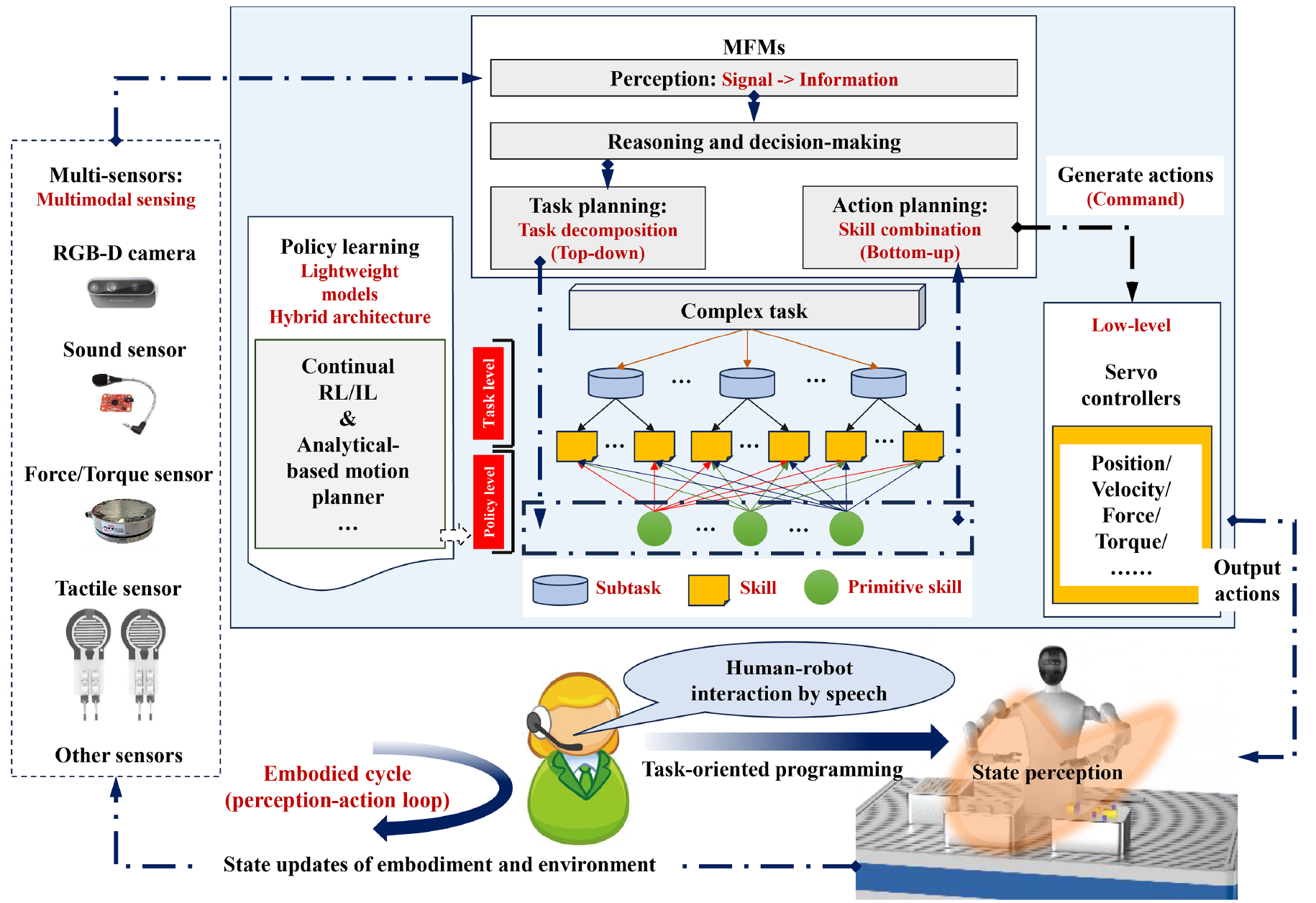
Advancing general robotic manipulation with multimodal
foundation models: Anembodied Al paradigm
Shifeng Huang, He Wang, Xing Zhou, Wenkai Chen, Haibin
Yang, Jianwei Zhang†
SCIENCE CHINA Technological Sciences
@article{2025Advancing,
title={Advancing general robotic manipulation with multimodal foundation models: An embodied AI paradigm},
author={ Huang, Shifeng and Wang, He and Zhou, Xing and Chen, Wenkai and Yang, Haibin and Zhang, Jianwei },
journal={Science China Technological Sciences},
volume={68},
number={5},
year={2025},
}

TrackVLA: Embodied Visual Tracking in the Wild
Shaoan Wang*, Jiazhao Zhang*, Minghan Li, Jiahang Liu, Anqi Li,
Kui Wu, Fangwei Zhong, Junzhi Yu, Zhizheng
Zhang†,
He Wang†
CoRL 2025
@article{wang2025trackvla,
author = {Wang, Shaoan and Zhang, Jiazhao and Li, Minghan and Liu, Jiahang and Li, Anqi and Wu, Kui and Zhong, Fangwei and Yu, Junzhi and Zhang, Zhizheng and Wang, He},
title = {TrackVLA: Embodied Visual Tracking in the Wild},
journal = {arXiv pre-print},
year = {2025},
url = {http://arxiv.org/abs/2505.23189}
}
FetchBot: Learning Generalizable Object Fetching in Cluttered
Scenes via Zero-Shot Sim2Real
Weiheng Liu*, Yuxuan Wan*, Jilong Wang, Yuxuan Kuang, Wenbo Cui,
Xuesong Shi, Haoran Li, Dongbin Zhao, Zhizheng
Zhang†, He Wang†
CoRL 2025(Oral)
@inproceedings{liufetchbot,
title={FetchBot: Learning Generalizable Object Fetching in Cluttered Scenes via Zero-Shot Sim2Real},
author={Liu, Weiheng and Wan, Yuxuan and Wang, Jilong and Kuang, Yuxuan and Shi, Xuesong and Li, Haoran and Zhao, Dongbin and Zhang, Zhizheng and Wang, He},
booktitle={9th Annual Conference on Robot Learning}
}
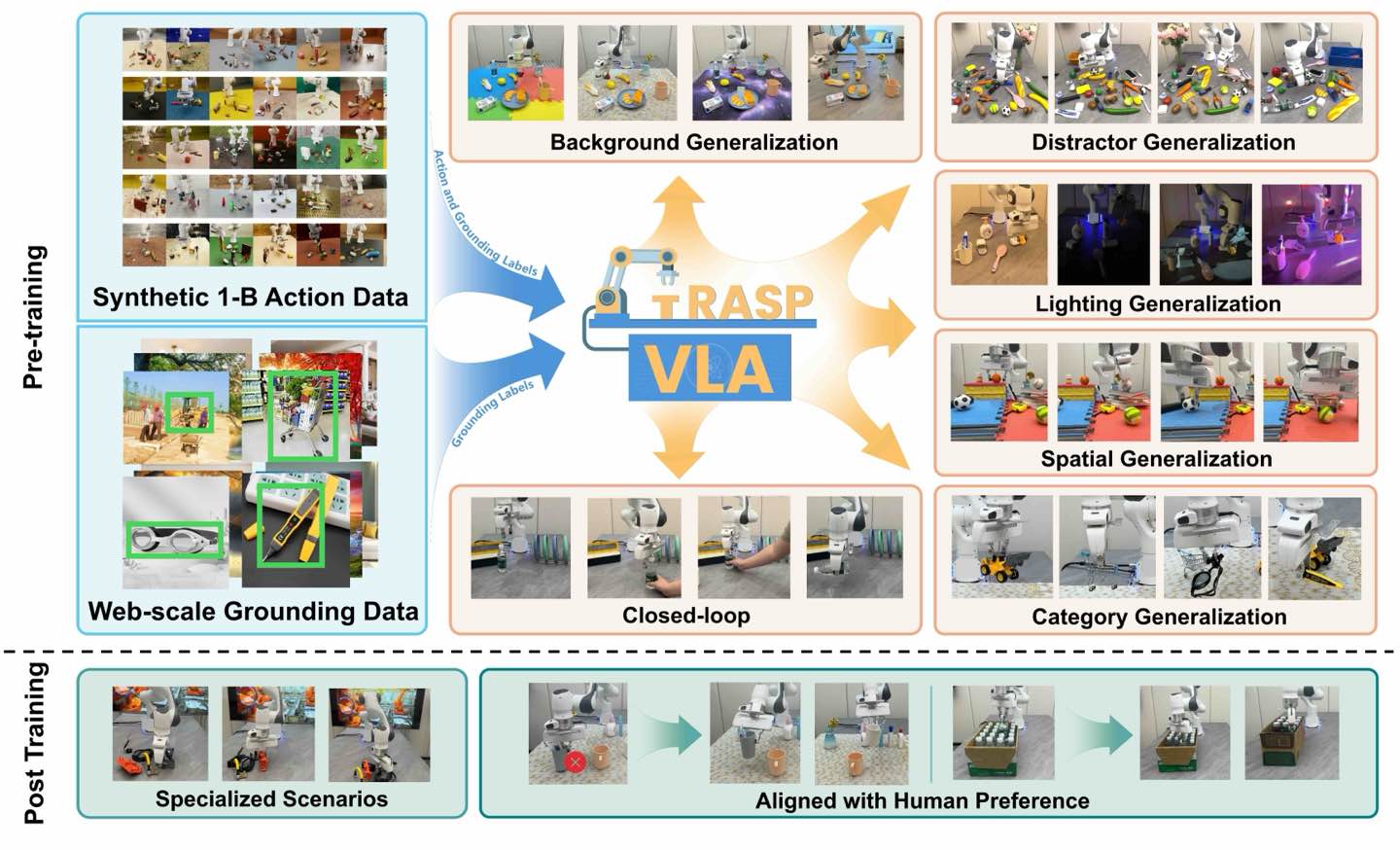
GraspVLA: a Grasping Foundation Model Pre-trained on
Billion-scale Synthetic Action Data
Shengliang Deng*, Mi Yan*, Songlin Wei, Haixin Ma, Yuxin Yang,
Jiayi Chen, Zhiqi Zhang, Taoyu Yang, Xuheng Zhang, Heming Cui,
Zhizheng Zhang†, He Wang†
CoRL 2025
@article{deng2025graspvla,
title={GraspVLA: a Grasping Foundation Model Pre-trained on Billion-scale Synthetic Action Data},
author={Shengliang Deng and Mi Yan and Songlin Wei and Haixin Ma and Yuxin Yang and Jiayi Chen and Zhiqi Zhang and Taoyu Yang and Xuheng Zhang and Wenhao Zhang and Heming Cui and Zhizheng Zhang and He Wang},
year={2025},
eprint={2505.03233},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2505.03233}
}
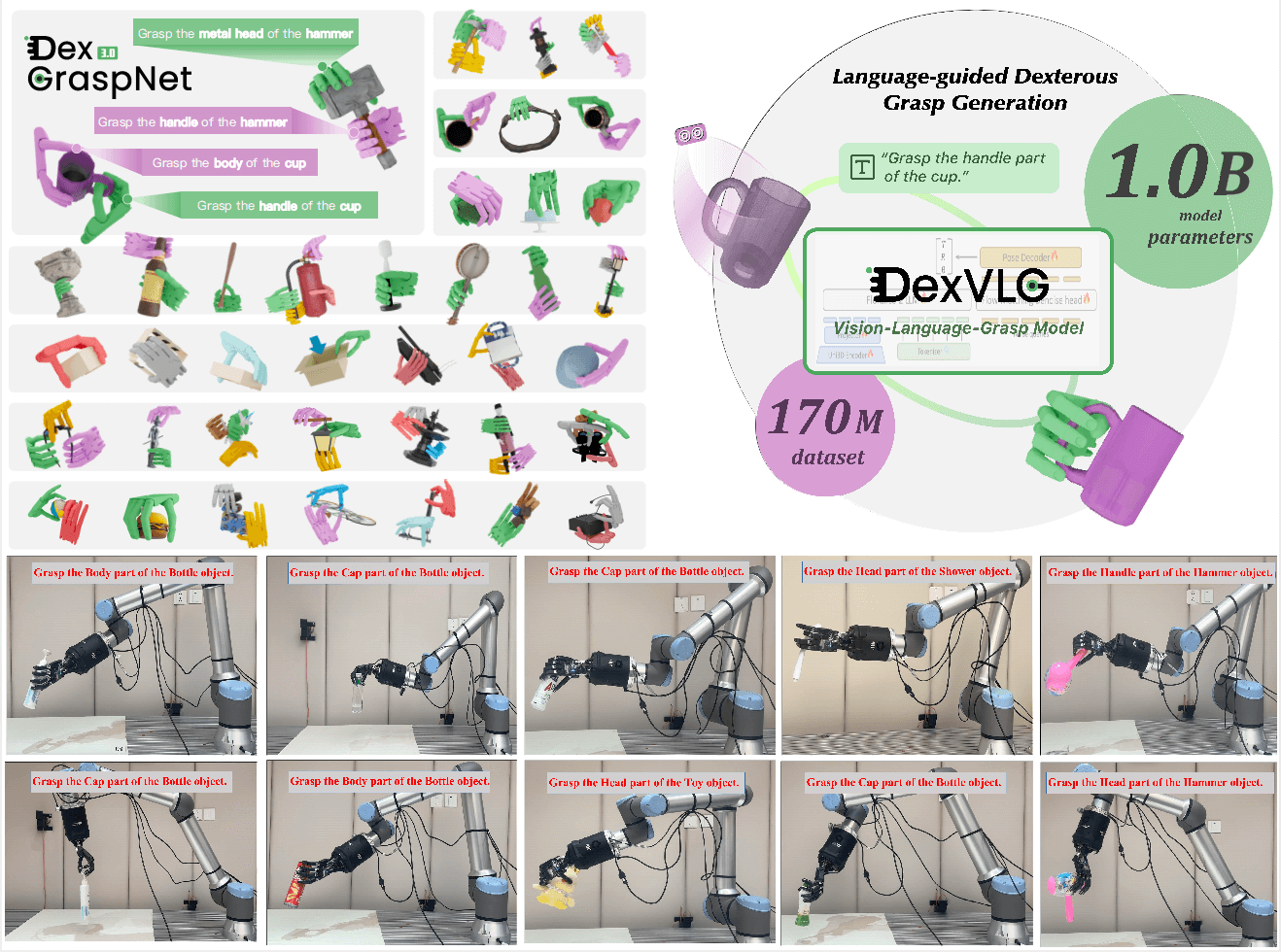
DexVLG: Dexterous Vision-Language-Grasp Model at Scale
Jiawei He*, Danshi Li*, Xinqiang Yu*, Zekun Qi, Wenyao Zhang,
Jiayi Chen, Zhaoxiang Zhang†, Zhizheng
Zhang†, Li Yi†,
He Wang†
ICCV 2025(highlight)
@misc{he2025dexvlgdexterousvisionlanguagegraspmodel,
title={DexVLG: Dexterous Vision-Language-Grasp Model at Scale},
author={Jiawei He and Danshi Li and Xinqiang Yu and Zekun Qi and Wenyao Zhang and Jiayi Chen and Zhaoxiang Zhang and Zhizheng Zhang and Li Yi and He Wang},
year={2025},
eprint={2507.02747},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2507.02747},
}
DyWA: Dynamics-adaptive World Action Model for Generalizable
Non-prehensile Manipulation
Jiangran Lyu, Ziming Li, Xuesong Shi, Chaoyi Xu, Yizhou Wang†,
He Wang†
ICCV 2025
@article{lyu2025dywa,
title={DyWA: Dynamics-adaptive World Action Model for Generalizable Non-prehensile Manipulation},
author={Lyu, Jiangran and Li, Ziming and Shi, Xuesong and Xu, Chaoyi and Wang, Yizhou and Wang, He},
journal={arXiv preprint arXiv:2503.16806},
year={2025}
}

RoboHanger: Learning Generalizable Robotic Hanger Insertion for
Diverse Garments
Yuxing Chen, Songlin Wei, Bowen Xiao, Jiangran Lyu, Jiayi Chen,
Feng Zhu, He Wang†
RA-L
@misc{chen2025robohangerlearninggeneralizablerobotic,
title={RoboHanger: Learning Generalizable Robotic Hanger Insertion for Diverse Garments},
author={Yuxing Chen and Songlin Wei and Bowen Xiao and Jiangran Lyu and Jiayi Chen and Feng Zhu and He Wang},
year={2025},
eprint={2412.01083},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2412.01083},
}

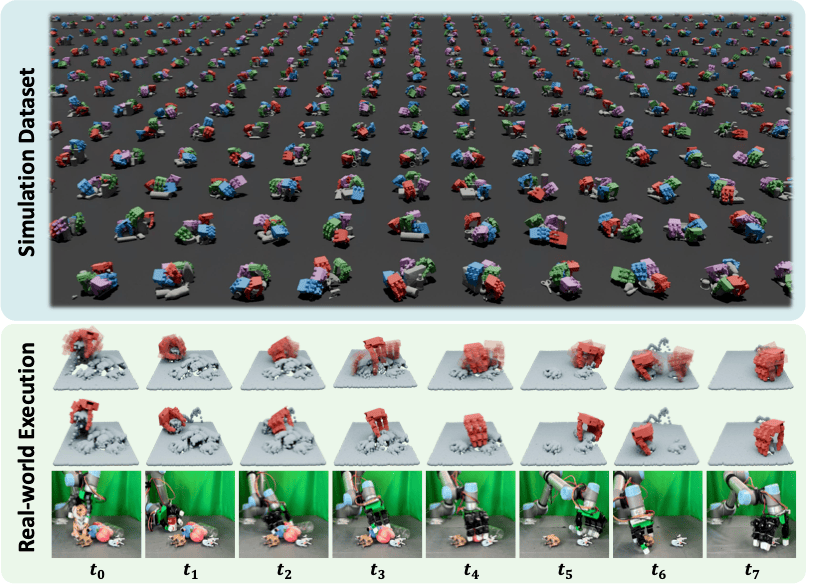
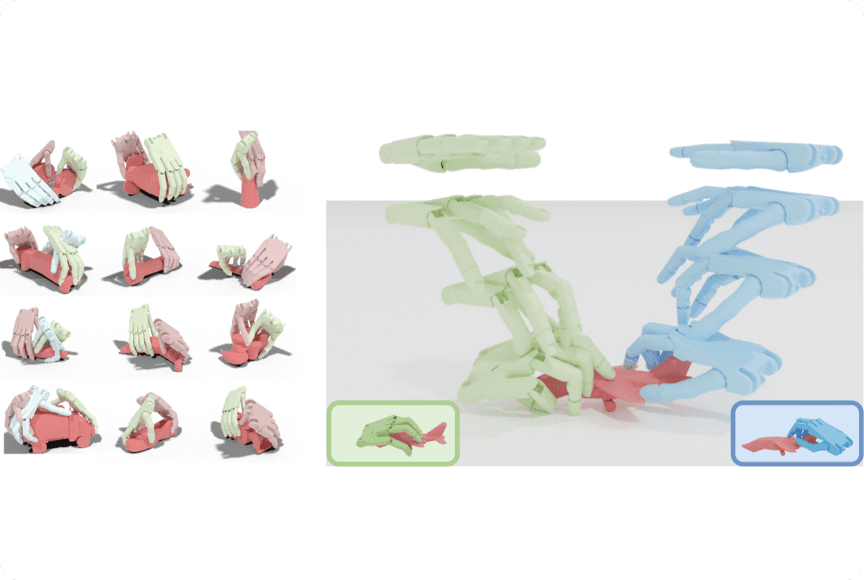
Dexonomy: Synthesizing All Dexterous Grasp Types in a Grasp
Taxonomy
Jiayi Chen*, Yubin Ke*, Lin Peng, He Wang†
RSS 2025
@article{chen2025dexonomy,
title={Dexonomy: Synthesizing All Dexterous Grasp Types in a Grasp Taxonomy},
author={Chen, Jiayi and Ke, Yubin and Peng, Lin and Wang, He},
journal={Robotics: Science and Systems},
year={2025}
}
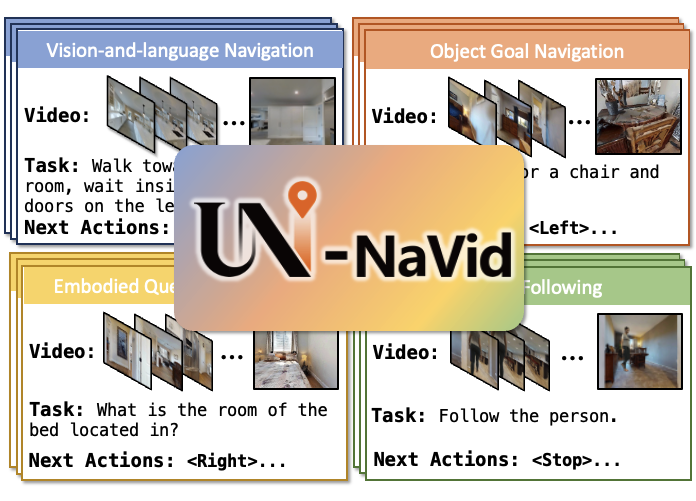
Uni-NaVid: A Video-based Vision-Language-Action Model for
Unifying Embodied Navigation Tasks
Jiazhao Zhang, Kunyu Wang, Shaoan Wang, Minghan Li, Haoran Liu,
Songlin Wei, Zhongyuan Wang, Zhizheng Zhang†, He Wang†
RSS 2025
@misc{zhang2024uninavid,
title={Uni-NaVid: A Video-based Vision-Language-Action Model for Unifying Embodied Navigation Tasks},
author={Jiazhao Zhang and Kunyu Wang and Shaoan Wang and Minghan Li and Haoran Liu and Songlin Wei and Zhongyuan Wang and Zhizheng Zhang and He Wang},
year={2024},
journal = {arXiv preprint arXiv:2412.06224}
}
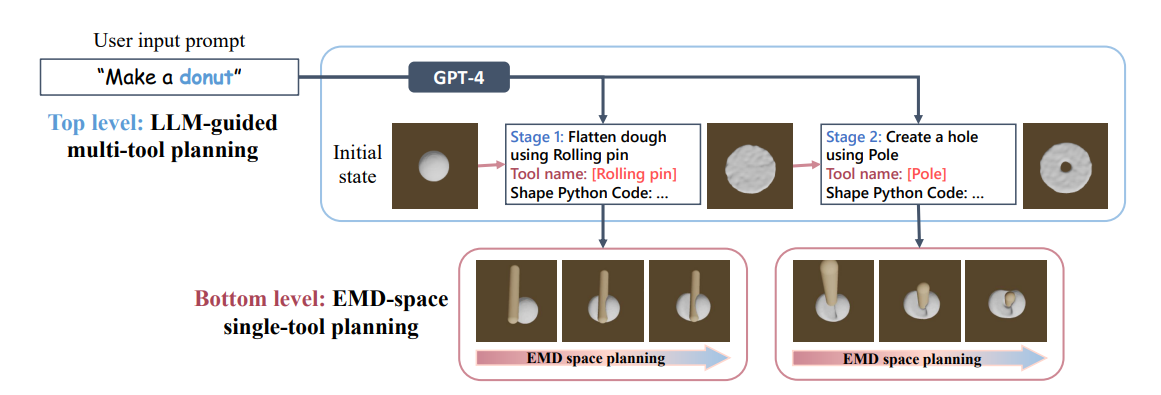
Make a Donut: Hierarchical EMD-Space Planning for Zero-Shot
Deformable Manipulation with Tools
Yang You, Bokui Shen, Congyue Deng, Haoran Geng, Songlin Wei,
He Wang, Leonidas J. Guibas†
RA-L 2025
@article{you2023make,
title={Make a Donut: Language-Guided Hierarchical EMD-Space Planning for Zero-shot Deformable Object Manipulation},
author={You, Yang and Shen, Bokui and Deng, Congyue and Geng, Haoran and Wang, He and Guibas, Leonidas},
journal={arXiv preprint arXiv:2311.02787},
year={2023}
}
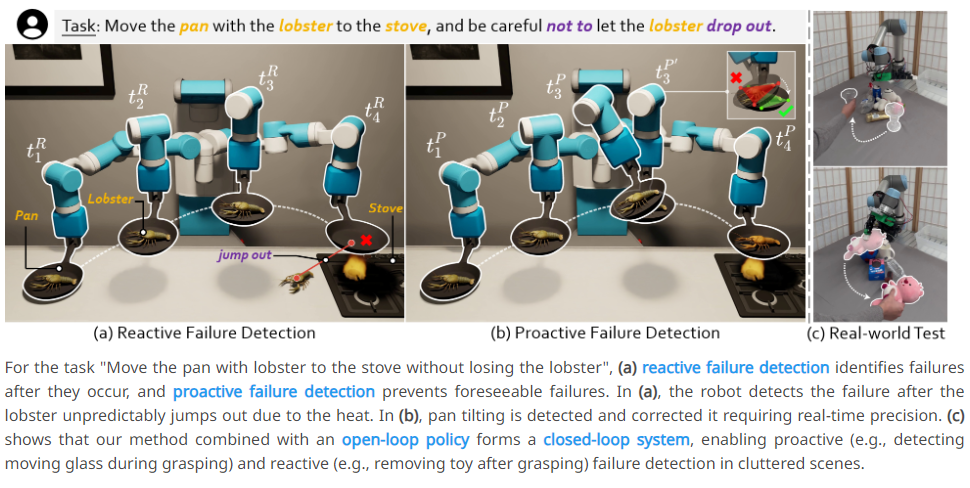
Code-as-Monitor: Constraint-aware Visual Programming for
Reactive and Proactive Robotic Failure Detection
Enshen Zhou*, Qi Su*, Cheng Chi*†, Zhizheng
Zhang, Zhongyuan Wang, Tiejun Huang, Lu
Sheng†, He Wang†
CVPR 2025
@article{zhou2024code,
title={Code-as-Monitor: Constraint-aware Visual Programming for Reactive and Proactive Robotic Failure Detection},
author={Zhou, Enshen and Su, Qi and Chi, Cheng and Zhang, Zhizheng and Wang, Zhongyuan and Huang, Tiejun and Sheng, Lu and Wang, He},
journal={arXiv preprint arXiv:2412.04455},
year={2024}
}
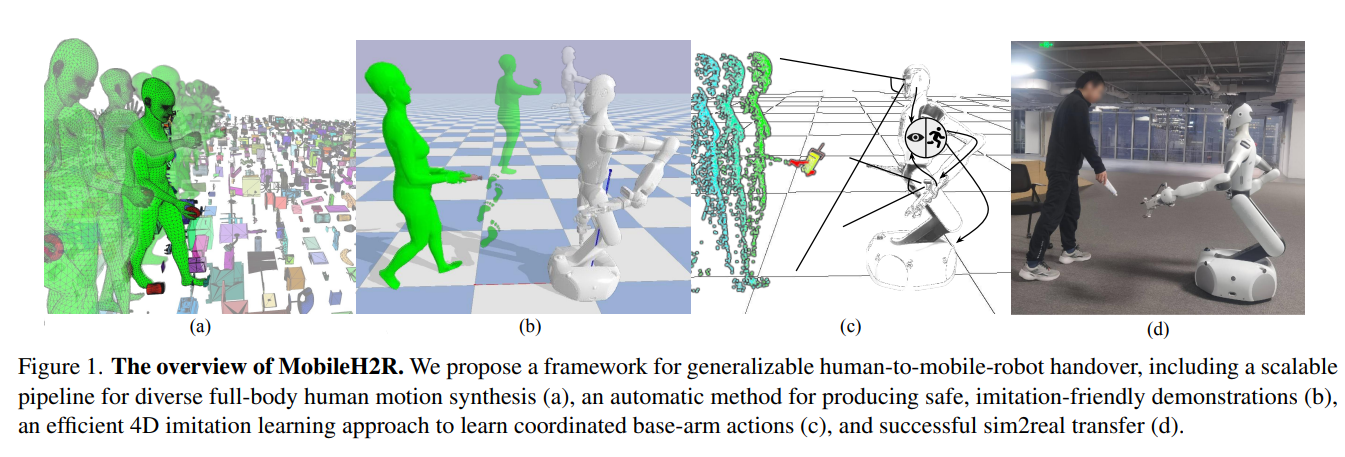
MobileH2R: Learning Generalizable Human to Mobile Robot Handover
Exclusively from Scalable and Diverse Synthetic Data
Zifan Wang*, Ziqing Chen*, Junyu Chen*, Jilong Wang, Yuxin Yang,
Yunze Liu, Xueyi Liu, He Wang, Li Yi†
CVPR 2025
@misc{wang2025mobileh2rlearninggeneralizablehuman,
title={MobileH2R: Learning Generalizable Human to Mobile Robot Handover Exclusively from Scalable and Diverse Synthetic Data},
author={Zifan Wang and Ziqing Chen and Junyu Chen and Jilong Wang and Yuxin Yang and Yunze Liu and Xueyi Liu and He Wang and Li Yi},
year={2025},
eprint={2501.04595},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2501.04595},
}
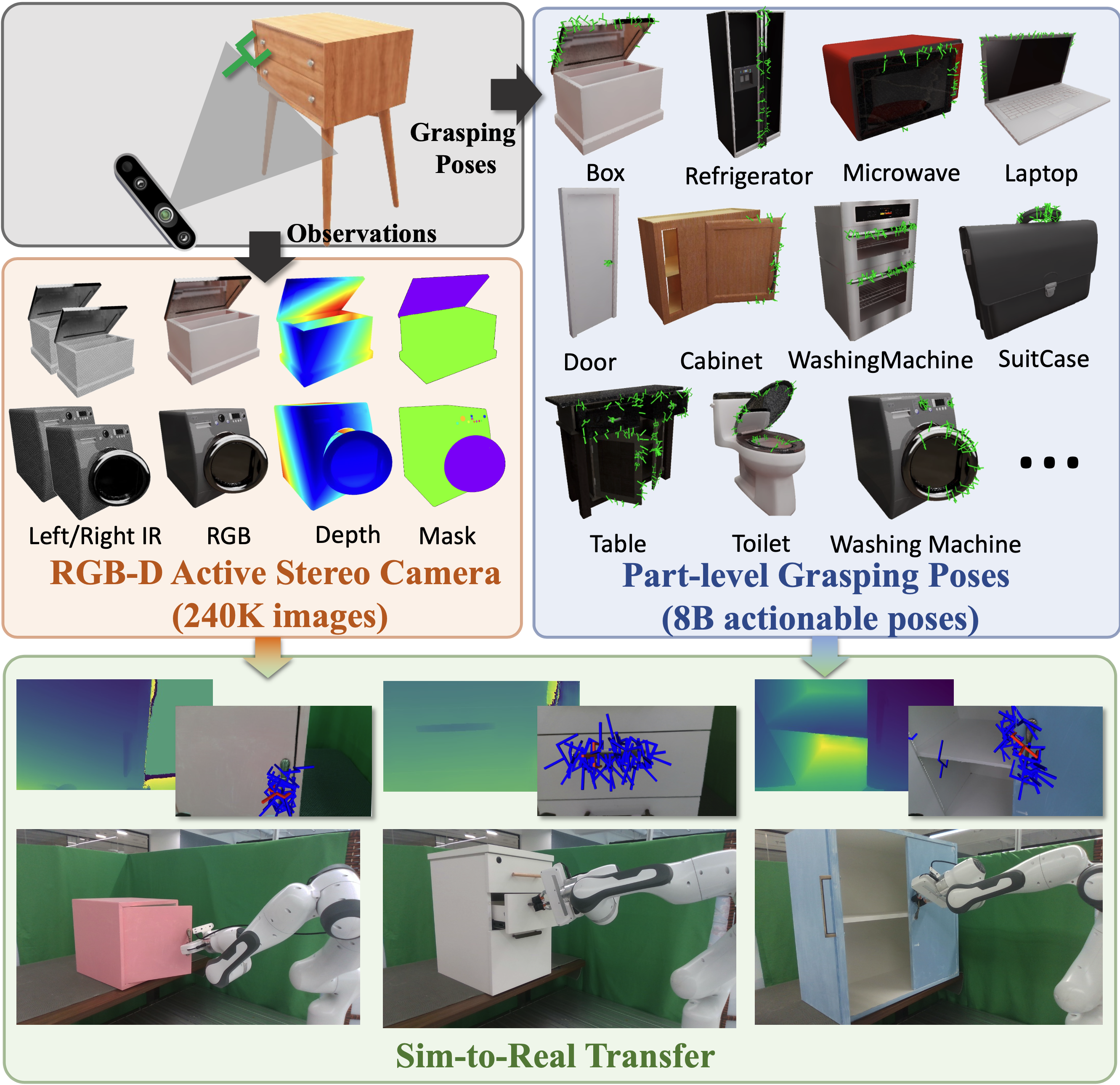
GAPartManip: A Large-scale Part-centric Dataset for
Material-Agnostic Articulated Object Manipulation
Wenbo Cui*, Chengyang Zhao* , Songlin Wei* , Jiazhao Zhang,
Haoran Geng, Yaran Chen,
He Wang†
ICRA 2025
@article{cui2024gapartmanip,
title={GAPartManip: A Large-scale Part-centric Dataset for Material-Agnostic Articulated Object Manipulation},
author={Cui, Wenbo and Zhao, Chengyang and Wei, Songlin and Zhang, Jiazhao and Geng, Haoran and Chen, Yaran and Wang, He},
journal={arXiv preprint arXiv:2411.18276},
year={2024}
}
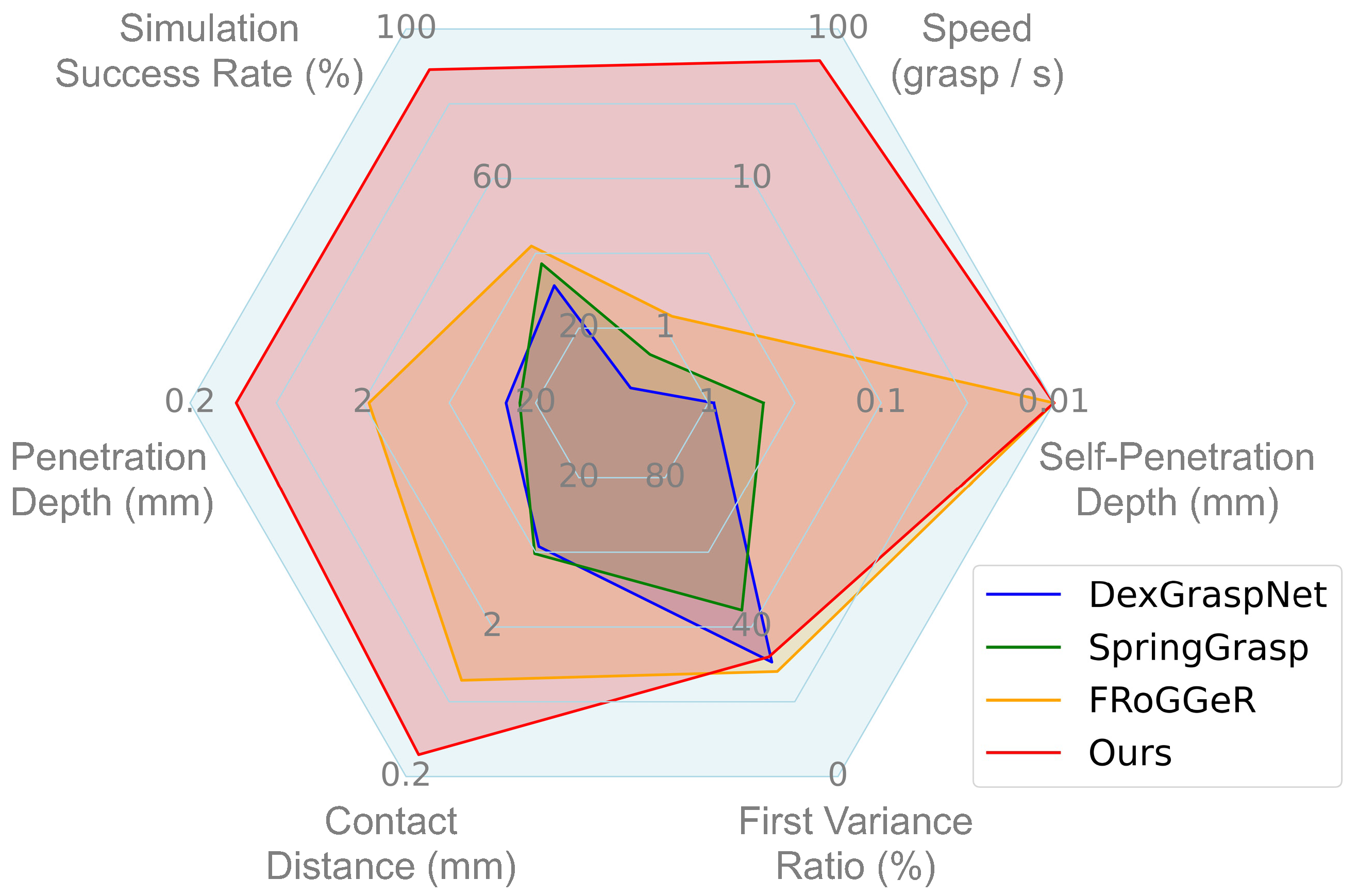
BODex: Scalable and Efficient Robotic Dexterous Grasp Synthesis
Using Bilevel Optimization
Jiayi Chen*, Yubin Ke*, He Wang†
ICRA 2025
@article{chen2024bodex,
title={BODex: Scalable and Efficient Robotic Dexterous Grasp Synthesis Using Bilevel Optimization},
author={Chen, Jiayi and Ke, Yubin and Wang, He},
journal={arXiv preprint arXiv:2412.16490},
year={2024}
}
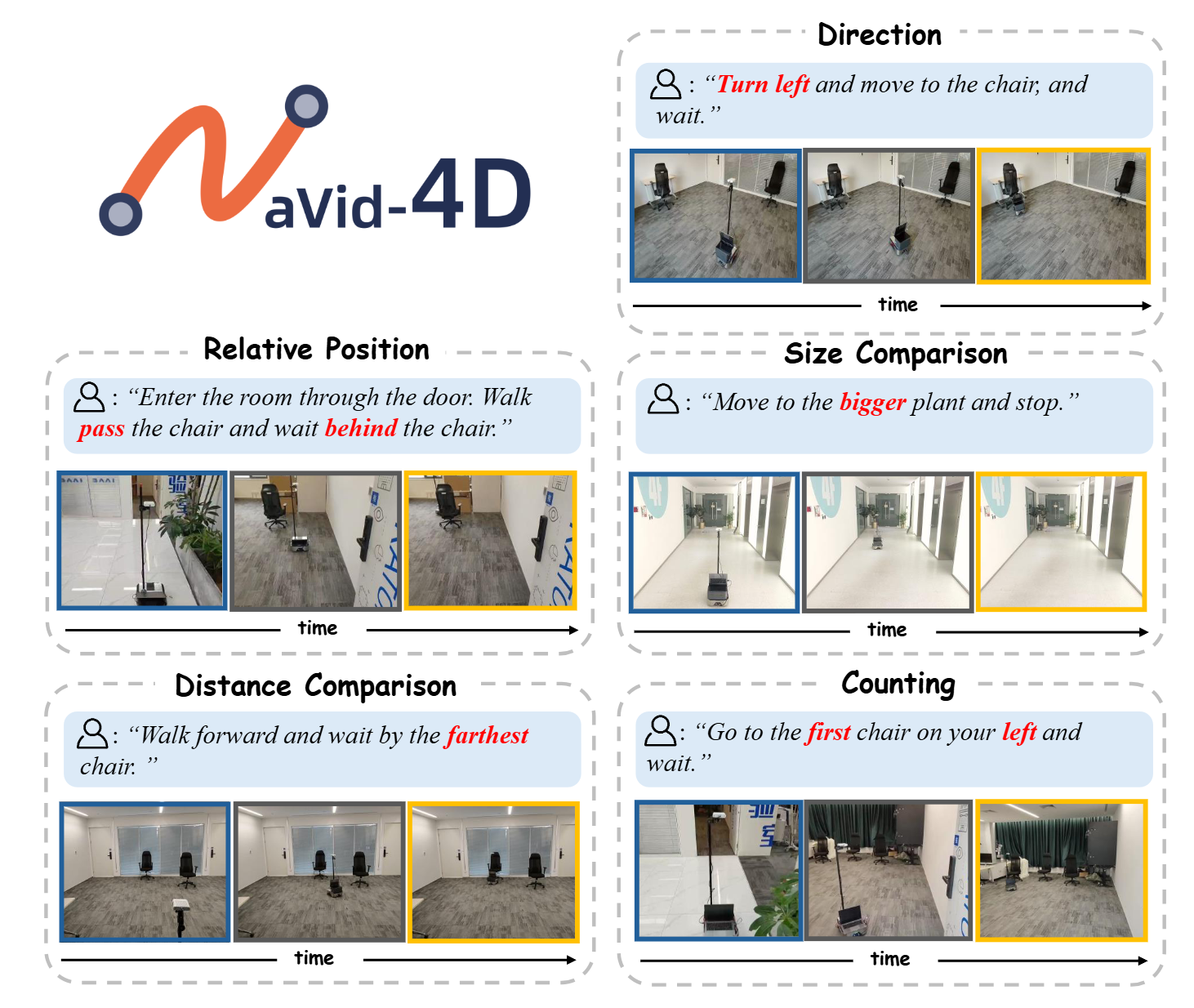
NaVid-4D: Unleashing Spatial Intelligence in Egocentric RGB-D
Videos for Vision-and-Language Navigation
Haoran Liu*, Weikang Wan*, Xiqian Yu*, Minghan Li*, Jiazhao
Zhang, Bo Zhao, Zhibo Chen, Zhongyuan Wang, Zhizheng Zhang†,
He Wang†
ICRA 2025
@inproceedings{liu2025navid4d,
title={NaVid-4D: Unleashing Spatial Intelligence in Egocentric RGB-D Videos for Vision-and-Language Navigation},
author={Liu, Haoran and Wan, Weikang and Yu, Xiqian and Li, Minghan and Zhang, Jiazhao and Zhao,
Bo and Chen, Zhibo and Wang, Zhongyuan and Zhang, Zhizheng and Wang, He},
booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)}
}

QuadWBG: Generalizable Quadrupedal Whole-Body Grasping
Jilong Wang*, Javokhirbek Rajabov*, Chaoyi Xu, Yiming Zheng,
He Wang†
ICRA 2025
@inproceedings{2024QuadWBG,
title={QuadWBG: Generalizable Quadrupedal Whole-Body Grasping},
author={ Wang, Jilong and Rajabov, Javokhirbek and Xu, Chaoyi and Zheng, Yiming and Wang, He },
year={2024},
}

Watch Less, Feel More: Direct Sim-to-real RL for Articulated
Object Manipulation with Motion Adaptation and Impedance Control
Tan-Dzung Do, Gireesh Nandiraju, Jilong Wang, He Wang†
ICRA 2025
@article{do2025watch,
title={Watch Less, Feel More: Sim-to-Real RL for Generalizable Articulated Object Manipulation via Motion Adaptation and Impedance Control},
author={Do, Tan-Dzung and Gireesh, Nandiraju and Wang, Jilong and Wang, He},
journal={arXiv preprint arXiv:2502.14457},
year={2025}
}
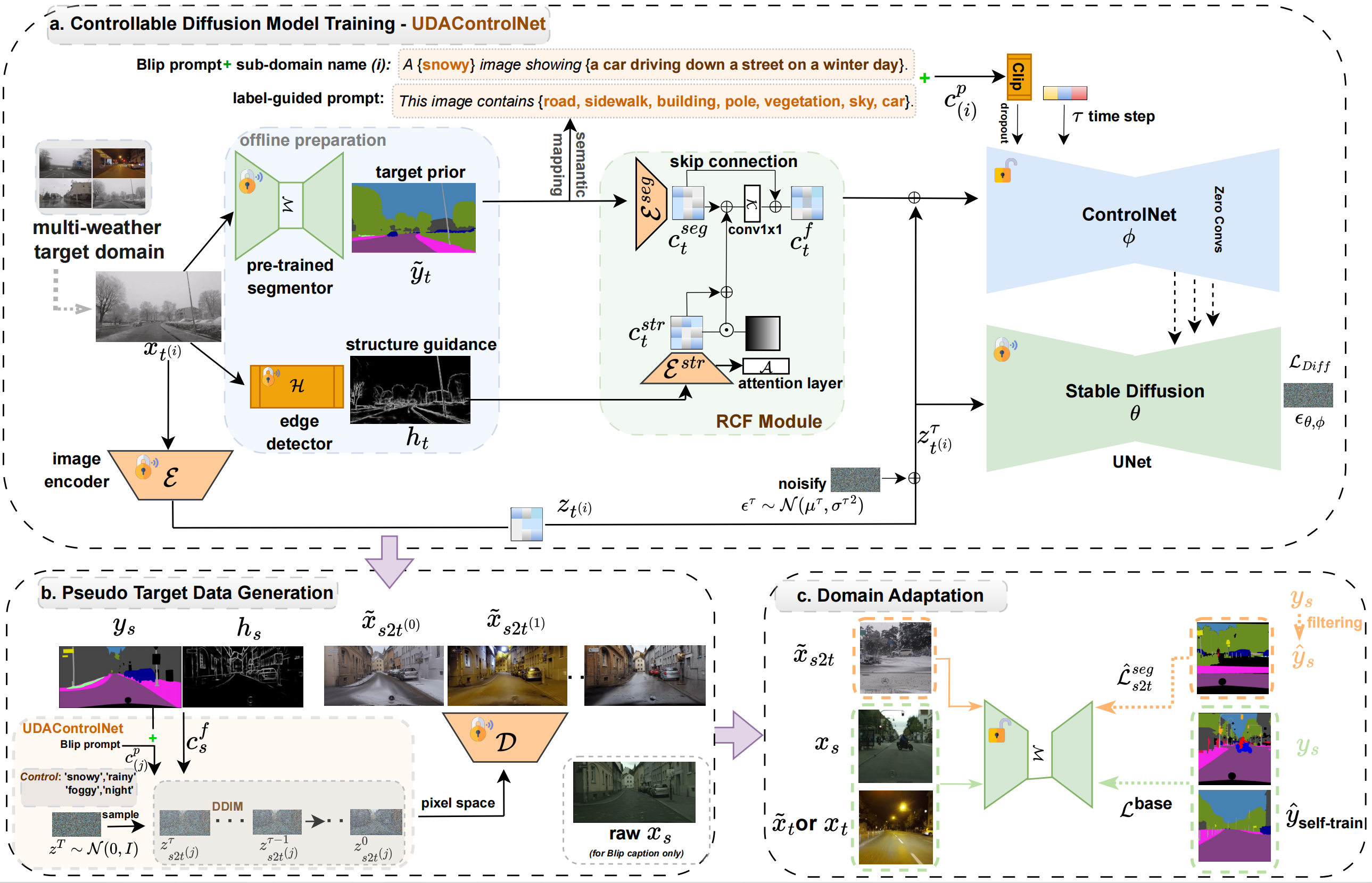
W-ControlUDA: Weather-Controllable Diffusion-assisted
Unsupervised Domain Adaptation for Semantic Segmentation
Fengyi Shen, Li Zhou, Kagan Kucukaytekin, George Eskandar,
Ziyuan Liu, He Wang†, Alois Knoll†
RA-L
@article{fengyi_2025,
title={W-ControlUDA: Weather-Controllable Diffusion-assisted Unsupervised Domain Adaptation for Semantic Segmentation},
author={Shen, Fengyi and Zhou, Li and Kuecuekaytekin, Kagan and Eskandar, George Basem Fouad and Liu, Ziyuan and Wang, He and Knoll, Alois},
volume={10},
url={http://dx.doi.org/10.1109/LRA.2025.3544925},
doi={10.1109/lra.2025.3544925},
number={5},
journal={IEEE Robotics and Automation Letters},
publisher={Institute of Electrical and Electronics Engineers (IEEE)},
year={2025},
month={May},
pages={4204-4211},
}
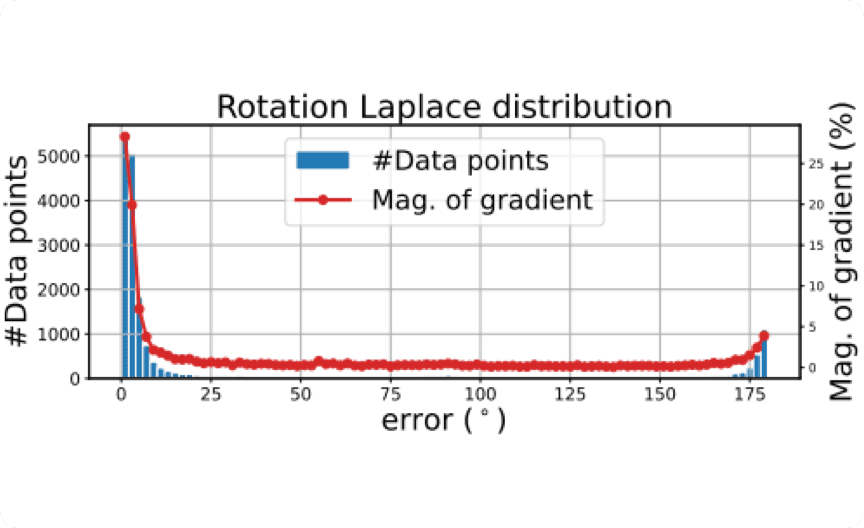
Towards Robust Probabilistic Modeling on SO(3) via Rotation
Laplace Distribution
Yingda Yin*, Jiangran Lyu*, Yang Wang,
He Wang†, Baoquan Chen†
TPAMI
@article{yin2025towards,
title={Towards robust probabilistic modeling on SO (3) via rotation laplace distribution},
author={Yin, Yingda and Lyu, Jiangran and Wang, Yang and Liu, Haoran and Wang, He and Chen, Baoquan},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2025},
publisher={IEEE},
}

D3RoMa: Disparity Diffusion-based Depth Sensing for
Material-Agnostic Robotic Manipulation
Songlin Wei, Haoran Geng, Jiayi Chen, Congyue Deng, Wenbo Cui,
Chengyang Zhao, Xiaomeng Fang, Leonidas J. Guibas,
He Wang†
CoRL 2024
@inproceedings{
wei2024droma,
title={D3RoMa: Disparity Diffusion-based Depth Sensing for Material-Agnostic Robotic Manipulation},
author={Songlin Wei and Haoran Geng and Jiayi Chen and Congyue Deng and Cui Wenbo and Chengyang Zhao and Xiaomeng Fang and Leonidas Guibas and He Wang},
booktitle={8th Annual Conference on Robot Learning},
year={2024},
url={https://openreview.net/forum?id=7E3JAys1xO}
}
DexGraspNet 2.0: Learning Generative Dexterous Grasping in
Large-scale Synthetic Cluttered Scenes
Jialiang Zhang*, Haoran Liu*, Danshi Li*, Xinqiang Yu*, Haoran
Geng, Yufei Ding, Jiayi Chen, He Wang†
CoRL 2024
@inproceedings{zhangdexgraspnet,
title={DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes},
author={Zhang, Jialiang and Liu, Haoran and Li, Danshi and Yu, XinQiang and Geng, Haoran and Ding, Yufei and Chen, Jiayi and Wang, He},
booktitle={8th Annual Conference on Robot Learning}
}

RAM: Retrieval-Based Affordance Transfer for Generalizable
Zero-Shot Robotic Manipulation
Yuxuan Kuang*, Junjie Ye*, Haoran Geng*, Jiageng Mao, Congyue
Deng, Leonidas J. Guibas, He Wang, Yue Wang†
CoRL 2024
@article{kuang2024ram,
title={RAM: Retrieval-Based Affordance Transfer for Generalizable Zero-Shot Robotic Manipulation},
author={Kuang, Yuxuan and Ye, Junjie and Geng, Haoran and Mao, Jiageng and Deng, Congyue and Guibas, Leonidas and Wang, He and Wang, Yue},
journal={arXiv preprint arXiv:2407.04689},
year={2024}
}

ScissorBot: Learning Generalizable Scissor Skill for Paper
Cutting via Simulation, Imitation, and Sim2Real
Jiangran Lyu, Yuxing Chen, Tao Du, Feng Zhu, Huiquan Liu, Yizhou
Wang†, He Wang†
CoRL 2024
@inproceedings{lyuscissorbot,
title = {ScissorBot: Learning Generalizable Scissor Skill for Paper Cutting via Simulation, Imitation, and Sim2Real},
author = {Lyu, Jiangran and Chen, Yuxing and Du, Tao and Zhu, Feng and Liu, Huiquan and Wang, Yizhou and Wang, He},
booktitle= {8th Annual Conference on Robot Learning}
}
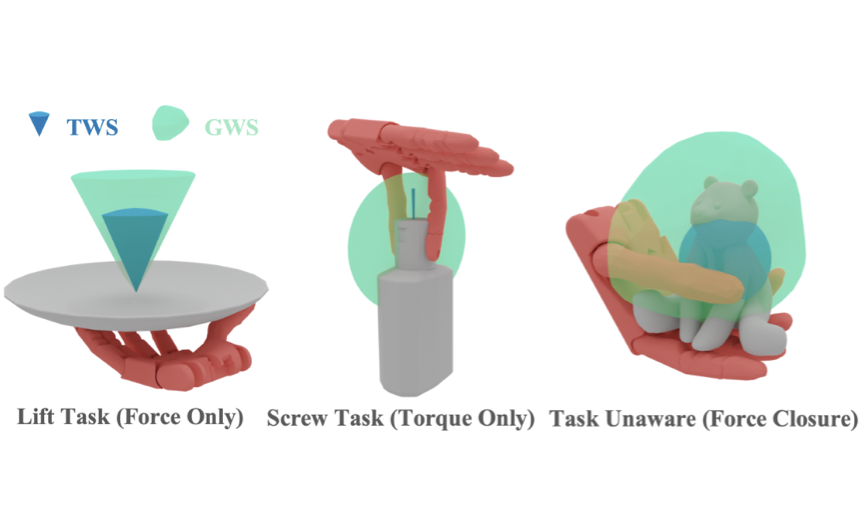
Task-Oriented Dexterous Grasp Synthesis via Differentiable Grasp
Wrench Boundary Estimator
Jiayi Chen, Yuxing Chen, Jialiang Zhang, He Wang†
IROS 2024
@article{chen2023task,
title={Task-Oriented Dexterous Grasp Synthesis via Differentiable Grasp Wrench Boundary Estimator},
author={Chen, Jiayi and Chen, Yuxing and Zhang, Jialiang and Wang, He},
journal={arXiv preprint arXiv:2309.13586},
year={2023}
}
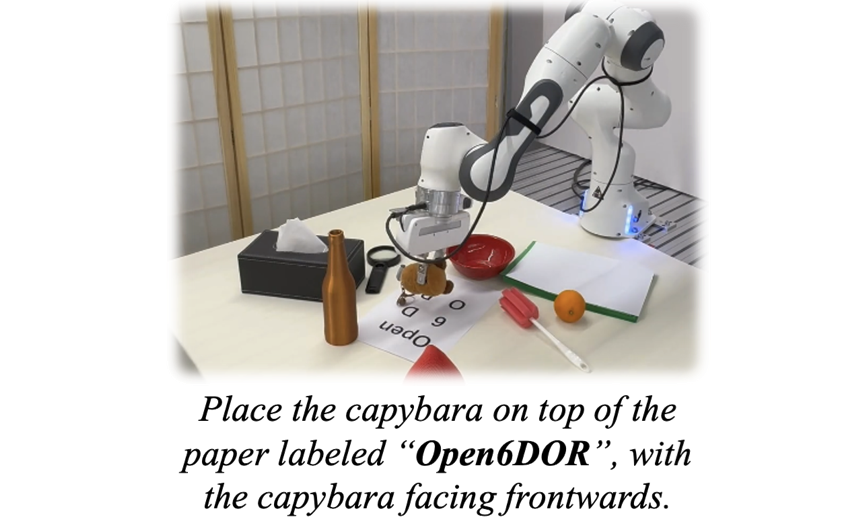
Open6DOR: Benchmarking Open-instruction 6-DoF Object
Rearrangement and A VLM-based Approach
Yufei Ding*, Haoran Geng*, Chaoyi Xu, Xiaomeng Fang, Jiazhao
Zhang, Songlin Wei, Qiyu Dai, Zhizheng Zhang, He Wang†
IROS 2024 (Oral Presentation)
@INPROCEEDINGS{10802733,
author={Ding, Yufei and Geng, Haoran and Xu, Chaoyi and Fang, Xiaomeng and Zhang, Jiazhao and Wei, Songlin and Dai, Qiyu and Zhang, Zhizheng and Wang, He},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Open6DOR: Benchmarking Open-instruction 6-DoF Object Rearrangement and A VLM-based Approach},
year={2024},
volume={},
number={},
pages={7359-7366},
keywords={Three-dimensional displays;Benchmark testing;Propulsion;6-DOF;Real-time systems;Artificial intelligence;Intelligent robots;Synthetic data},
doi={10.1109/IROS58592.2024.10802733}
}
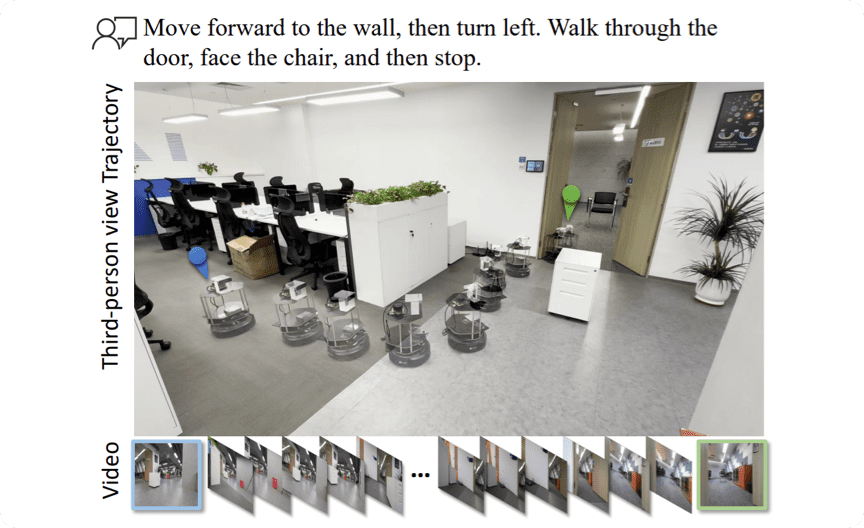
NaVid: Video-based VLM Plans the Next Step for
Vision-and-Language Navigation
Jiazhao Zhang*, Kunyu Wang*, Rongtao Xu*, Gengze Zhou, Yicong
Hong, Xiaomeng Fang, Qi Wu, Zhizheng Zhang†, He Wang†
RSS 2024
@article{zhang2024navid,
title={NaVid: Video-based VLM Plans the Next Step for Vision-and-Language Navigation},
author={Zhang, Jiazhao and Wang, Kunyu and Xu, Rongtao and Zhou, Gengze and Hong, Yicong and Fang, Xiaomeng and Wu, Qi and Zhang, Zhizheng and Wang, He},
journal={Robotics: Science and Systems},
year={2024}
}
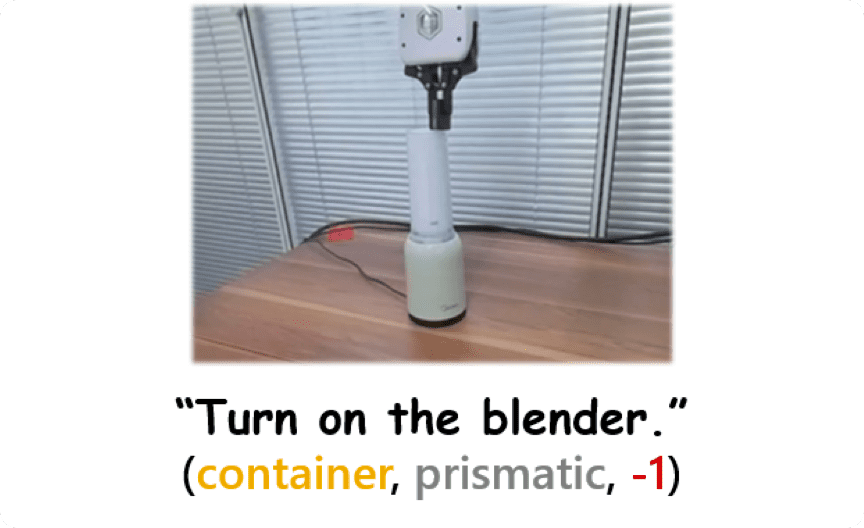
SAGE: Bridging Semantic and Actionable Parts for Generalizable
Manipulation of Articulated Objects
Haoran Geng*, Songlin Wei*, Congyue Deng, Bokui Shen,
He Wang†, Leonidas J. Guibas†
RSS 2024
@misc{geng2023sage,
title={SAGE: Bridging Semantic and Actionable Parts for GEneralizable Articulated-Object Manipulation under Language Instructions},
author={Haoran Geng and Songlin Wei and Congyue Deng and Bokui Shen and He Wang and Leonidas Guibas},
year={2023},
eprint={2312.01307},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
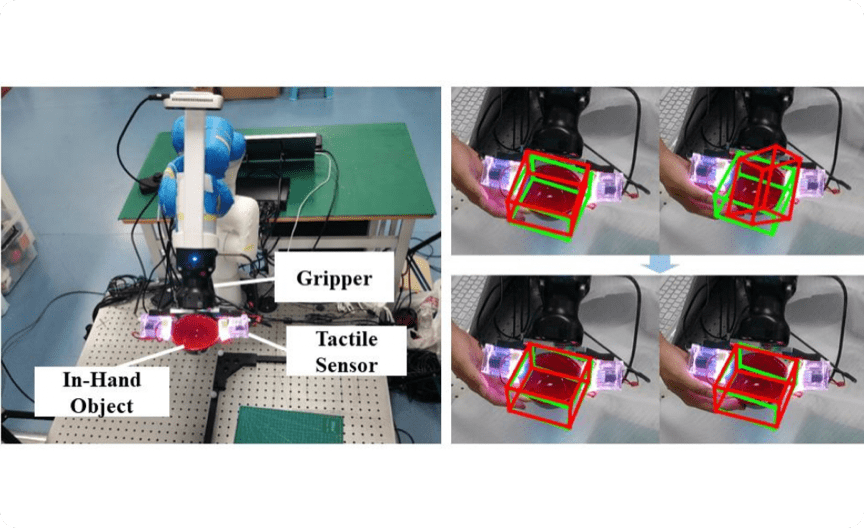
Enhancing Generalizable 6D Pose Tracking of an In-Hand Object
with Tactile Sensing
Yun Liu*, Xiaomeng Xu*, Weihang Chen, Haocheng Yuan,
He Wang, Jing Xu, Rui Chen, Li Yi†
RA-L
@ARTICLE{10333330,
author={Liu, Yun and Xu, Xiaomeng and Chen, Weihang and Yuan, Haocheng and Wang, He and Xu, Jing and Chen, Rui and Yi, Li},
journal={IEEE Robotics and Automation Letters},
title={Enhancing Generalizable 6D Pose Tracking of an In-Hand Object With Tactile Sensing},
year={2024},
volume={9},
number={2},
pages={1106-1113},
keywords={Visualization;Kinematics;Sensor fusion;Tracking;Three-dimensional displays;Tactile sensors;Visualization;Robot kinematics;Force and tactile sensing;sensor fusion;visual tracking},
doi={10.1109/LRA.2023.3337690}
}
MaskClustering: View Consensus based Mask Graph Clustering for
Open-Vocabulary 3D Instance Segmentation
Mi Yan, Jiazhao Zhang, Yan Zhu, He Wang†
CVPR 2024
@INPROCEEDINGS{10658542,
author={Yan, Mi and Zhang, Jiazhao and Zhu, Yan and Wang, He},
booktitle={2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
title={MaskClustering: View Consensus Based Mask Graph Clustering for Open-Vocabulary 3D Instance Segmentation},
year={2024},
volume={},
number={},
pages={28274-28284},
keywords={Measurement;Instance segmentation;Solid modeling;Computer vision;Three-dimensional displays;Shape;Navigation;3D instance segmentation;open-vocabulary},
doi={10.1109/CVPR52733.2024.02671}
}
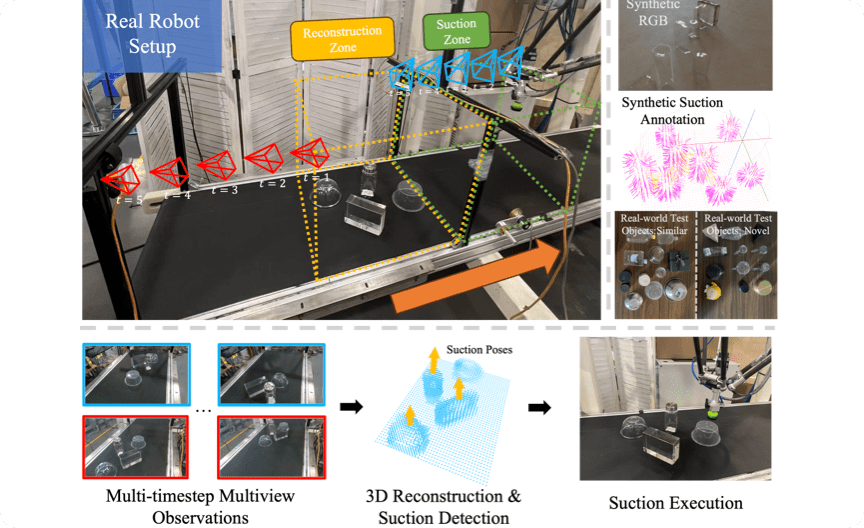
STOPNet: Multiview-based 6-DoF Suction Detection for Transparent
Objects on Production Lines
Yuxuan Kuang*, Qin Han*, Danshi Li, Qiyu Dai, Lian Ding, Dong
Sun, Hanlin Zhao,
He Wang†
ICRA 2024
@inproceedings{kuang2023stopnet,
title={STOPNet: Multiview-based 6-DoF Suction Detection for Transparent Objects on Production Lines},
author={Kuang, Yuxuan and Han, Qin and Li, Danshi and Dai, Qiyu and Ding, Lian and Sun, Dong and Zhao, Hanlin and Wang, He},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
year={2024},
organization={IEEE}
}
GAMMA: Graspability-Aware Mobile MAnipulation Policy Learning
based on Online Grasping Pose Fusion
Jiazhao Zhang*, Nandiraju Gireesh*, Jilong Wang, Xiaomeng Fang,
Chaoyi Xu, Weiguang Chen, Liu Dai,
He Wang†
ICRA 2024
@misc{zhang2023gamma,
title={GAMMA: Graspability-Aware Mobile MAnipulation Policy Learning based on Online Grasping Pose Fusion},
author={Jiazhao Zhang and Nandiraju Gireesh and Jilong Wang and Xiaomeng Fang and Chaoyi Xu and Weiguang Chen and Liu Dai and He Wang},
year={2023},
eprint={2309.15459},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
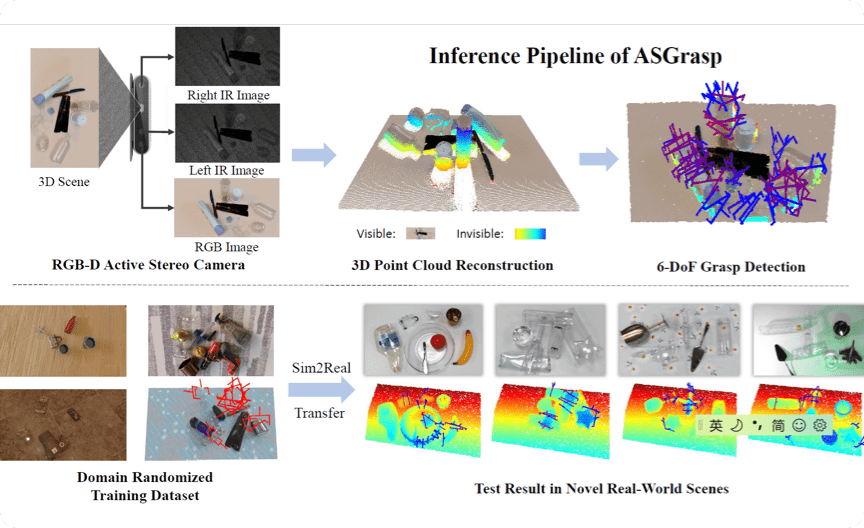
ASGrasp: Generalizable Transparent Object Reconstruction and
6-DoF Grasp Detection from RGB-D Active Stereo Camera
Jun Shi, Yong A, Yixiang Jin, Dingzhe Li, Haoyu Niu, Zhezhu Jin,
He Wang†
ICRA 2024
@article{shi2024gsnet,
title={ASGrasp: Generalizable Transparent Object Reconstruction and 6-DoF Grasp Detection from RGB-D Active Stereo Camera},
author={Jun Shi, Yong A, Yixiang Jin, Dingzhe Li, Haoyu Niu, Zhezhu Jin, He Wang},
journal={arXiv preprint arXiv:2405.05648},
year={2024}
}
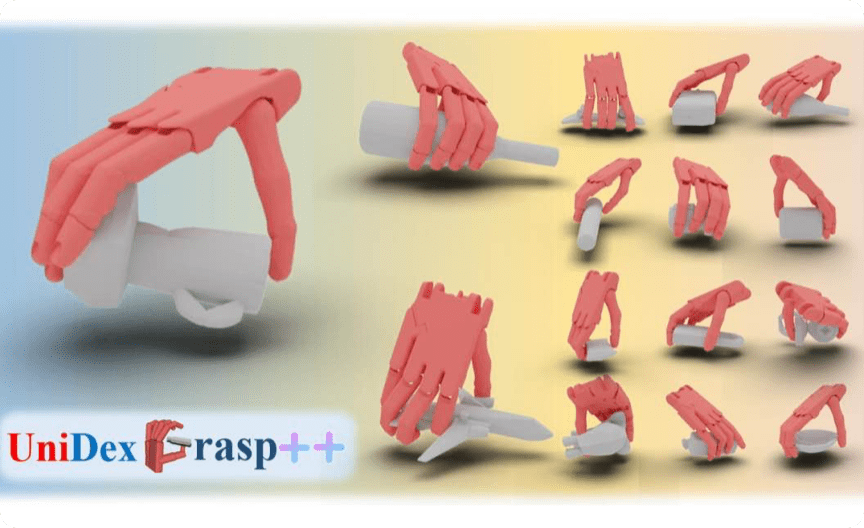
UniDexGrasp++: Improving Dexterous Grasping Policy Learning via
Geometry-aware Curriculum and Iterative Generalist-Specialist
Learning
Weikang Wan*, Haoran Geng*, Yun Liu, Zikang Shan, Yaodong Yang,
Li Yi,
He Wang†
ICCV 2023 (Oral & Best Paper Finalist, final reviews of
all strong accepts)
@article{wan2023unidexgrasp++,
title={UniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning},
author={Wan, Weikang and Geng, Haoran and Liu, Yun and Shan, Zikang and Yang, Yaodong and Yi, Li and Wang, He},
journal={arXiv preprint arXiv:2304.00464},
year={2023}
}

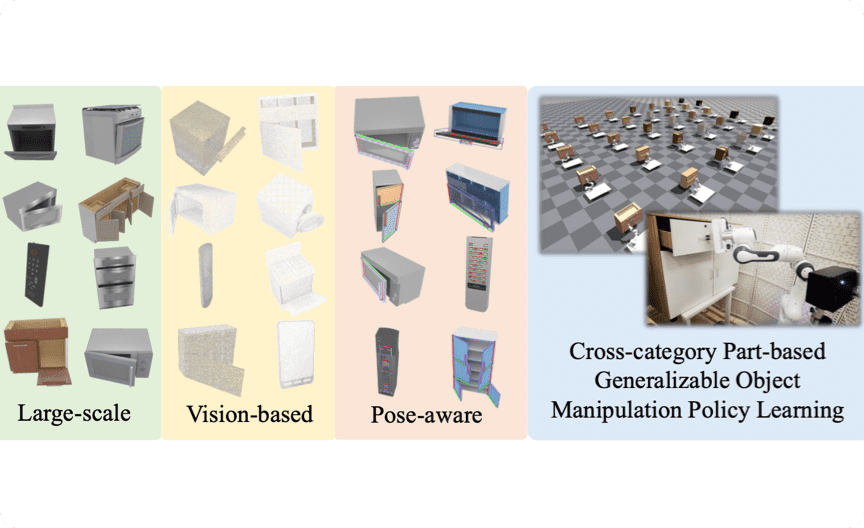
GAPartNet: Cross-Category Domain-Generalizable Object Perception
and Manipulation via Generalizable and Actionable Parts
Haoran Geng*, Helin Xu*, Chengyang Zhao*, Chao Xu, Li Yi, Siyuan
Huang,
He Wang†
CVPR 2023 (Highlight, final reviews of all accepts)
@article{geng2022gapartnet,
title={GAPartNet: Cross-Category Domain-Generalizable Object Perception and Manipulation via Generalizable and Actionable Parts},
author={Geng, Haoran and Xu, Helin and Zhao, Chengyang and Xu, Chao and Yi, Li and Huang, Siyuan and Wang, He},
journal={arXiv preprint arXiv:2211.05272},
year={2022}
}
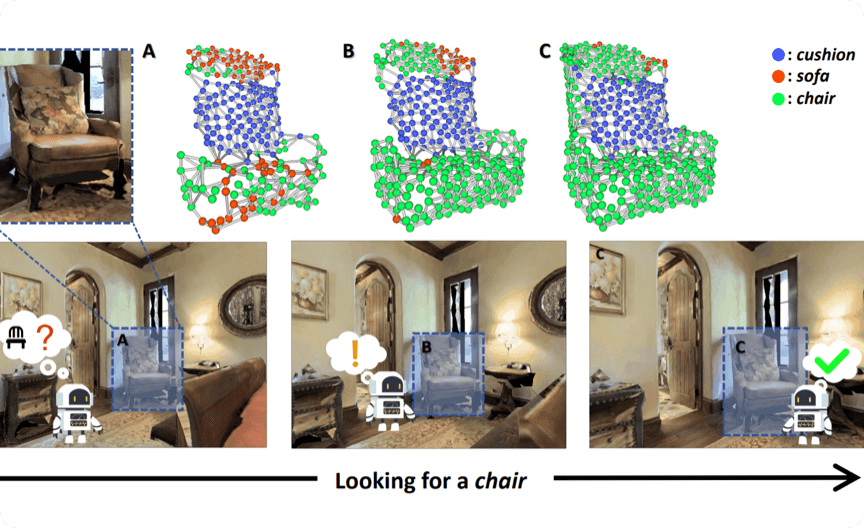
3D-Aware Object Goal Navigation via Simultaneous Exploration and
Identification
Jiazhao Zhang*, Liu Dai*, Fanpeng Meng, Qingnan Fan, Xuelin
Chen, Kai Xu,
He Wang†
CVPR 2023
@article{zhang20223d,
title={3D-Aware Object Goal Navigation via Simultaneous Exploration and Identification},
author={Zhang, Jiazhao and Dai, Liu and Meng, Fanpeng and Fan, Qingnan and Chen, Xuelin and Xu, Kai and Wang, He},
journal={arXiv preprint arXiv:2212.00338},
year={2022}
}
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning
Diverse Proposal Generation and Goal-Conditioned Policy
Yinzhen Xu*, Weikang Wan*, Jialiang Zhang*, Haoran Liu*, Zikang
Shan, Hao Shen, Ruicheng Wang, Haoran Geng, Yijia Weng, Jiayi
Chen, Tengyu Liu, Li Yi,
He Wang†
CVPR 2023
@article{xu2023unidexgrasp,
title={UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy},
author={Xu, Yinzhen and Wan, Weikang and Zhang, Jialiang and Liu, Haoran and Shan, Zikang and Shen, Hao and Wang, Ruicheng and Geng, Haoran and Weng, Yijia and Chen, Jiayi and others},
journal={arXiv preprint arXiv:2303.00938},
year={2023}
}
PartManip: Learning Cross-Category Generalizable Part
Manipulation Policy from Point Cloud Observations
Haoran Geng*, Ziming Li*, Yiran Geng, Jiayi Chen, Hao Dong,
He Wang†
CVPR 2023
@article{geng2023partmanip,
title={PartManip: Learning Cross-Category Generalizable Part Manipulation Policy from Point Cloud Observations},
author={Geng, Haoran and Li, Ziming and Geng, Yiran and Chen, Jiayi and Dong, Hao and Wang, He},
journal={arXiv preprint arXiv:2303.16958},
year={2023}
}
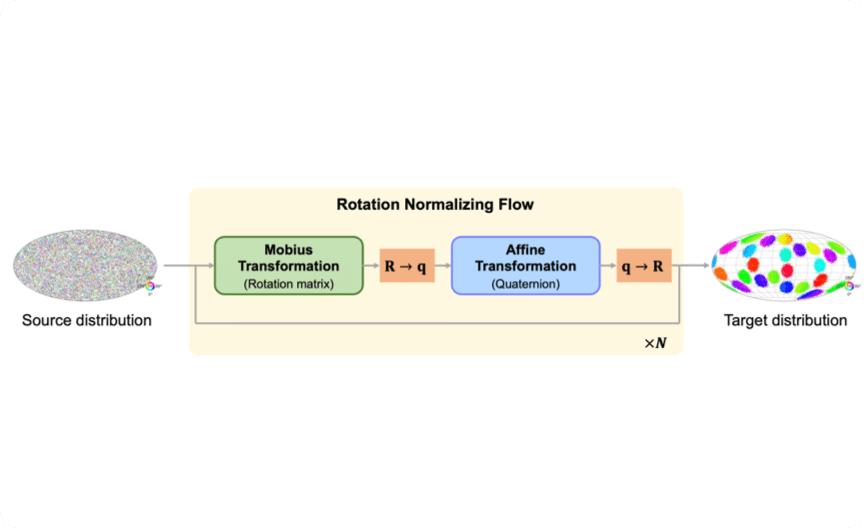
Delving into Discrete Normalizing Flows on SO(3) Manifold for
Probabilistic Rotation Modeling
Yulin Liu*, Haoran Liu*, Yingda Yin*, Yang Wang, Baoquan
Chen†,
He Wang†
CVPR 2023
@article{liu2023delving,
title={Delving into Discrete Normalizing Flows on SO (3) Manifold for Probabilistic Rotation Modeling},
author={Liu, Yulin and Liu, Haoran and Yin, Yingda and Wang, Yang and Chen, Baoquan and Wang, He},
journal={arXiv preprint arXiv:2304.03937},
year={2023}
}
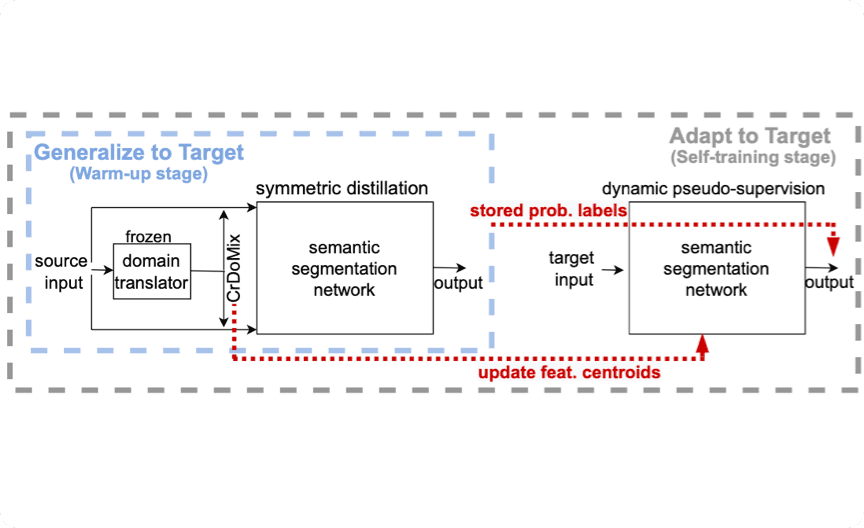
DiGA: Distil to Generalize and then Adapt for Domain Adaptive
Semantic Segmentation
Fengyi Shen, Akhil Gurram, Ziyuan Liu,
He Wang†, Alois Knoll†
CVPR 2023
@article{shen2023diga,
title={DiGA: Distil to Generalize and then Adapt for Domain Adaptive Semantic Segmentation},
author={Shen, Fengyi and Gurram, Akhil and Liu, Ziyuan and Wang, He and Knoll, Alois},
journal={arXiv preprint arXiv:2304.02222},
year={2023}
}
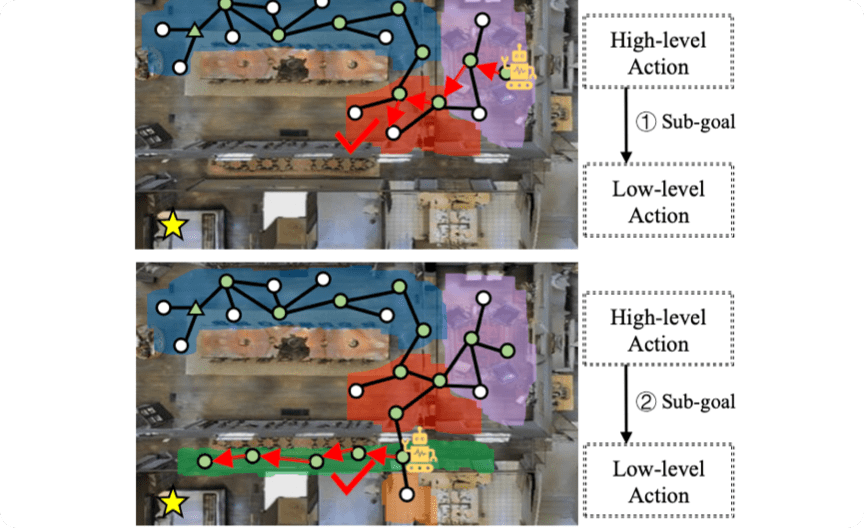
Adaptive Zone-aware Hierarchical Planner for Vision-Language
Navigation
Chen Gao, Xingyu Peng, Mi Yan,
He Wang, Lirong Yang, Haibing Ren, Hongsheng Li, Si
Liu†
CVPR 2023
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for
General Objects Based on Simulation
Ruicheng Wang*, Jialiang Zhang*, Jiayi Chen, Yinzhen Xu, Puhao
Li, Tengyu Liu,
He Wang†
ICRA 2023 (Outstanding Manipulation Paper Award Finalist)
@article{2210.02697,
title = {DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation},
author = {Ruicheng Wang and Jialiang Zhang and Jiayi Chen and Yinzhen Xu and Puhao Li and Tengyu Liu and He Wang},
journal={arXiv preprint arXiv:2210.02697},
year = {2022}
}
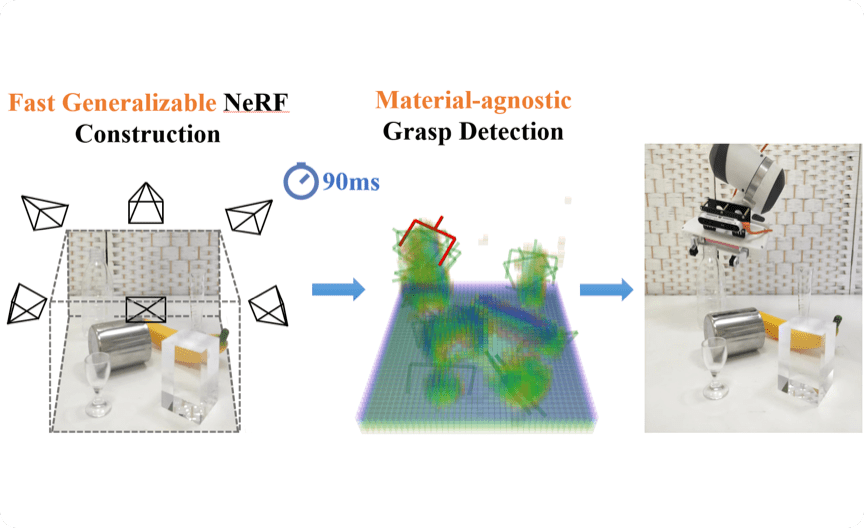
GraspNeRF: Multiview-based 6-DoF Grasp Detection for Transparent
and Specular Objects Using Generalizable NeRF
Qiyu Dai*, Yan Zhu*, Yiran Geng, Ciyu Ruan, Jiazhao Zhang,
He Wang†
ICRA 2023
@article{dai2022graspnerf,
title={GraspNeRF: Multiview-based 6-DoF Grasp Detection for Transparent and Specular Objects Using Generalizable NeRF},
author={Dai, Qiyu and Zhu, Yan and Geng, Yiran and Ruan, Ciyu and Zhang, Jiazhao and Wang, He},
journal={arXiv preprint arXiv:2210.06575},
year={2022}
}
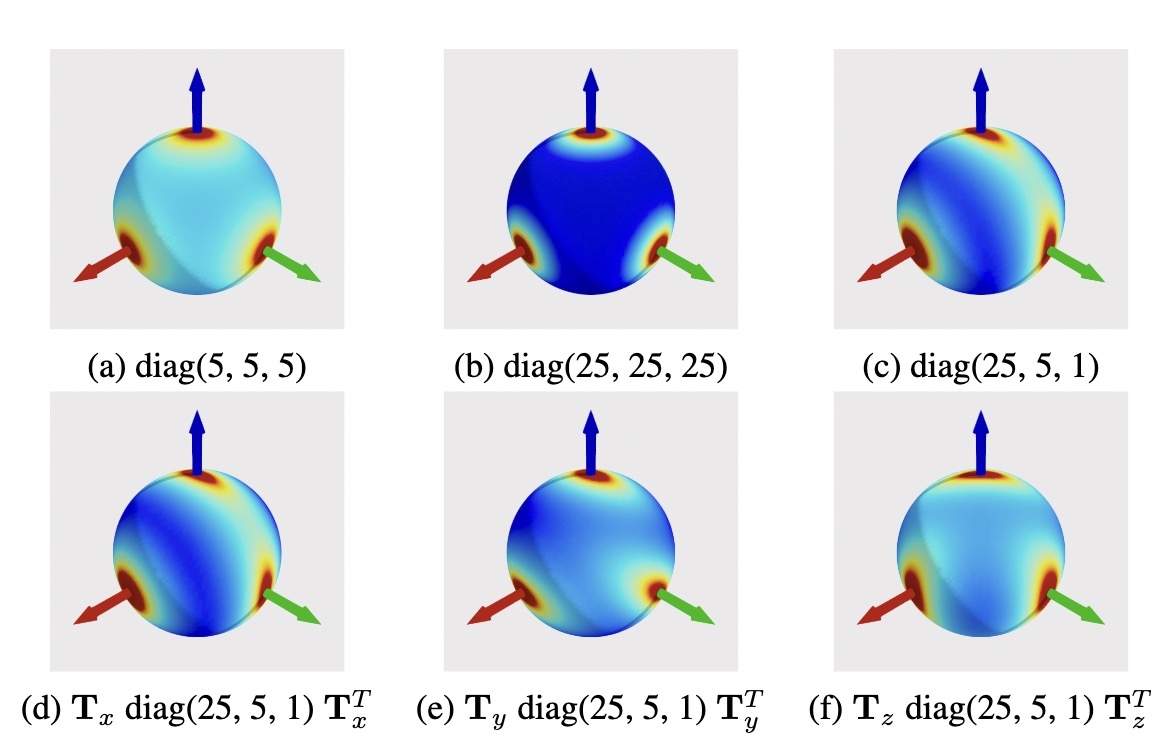
A Laplace-inspired Distribution on SO(3) for Probabilistic
Rotation Estimation
Yingda Yin, Yang Wang,
He Wang†, Baoquan Chen†
ICLR 2023 (notable top 25%)
@inproceedings{
yin2023a,
title={A Laplace-inspired Distribution on {SO}(3) for Probabilistic Rotation Estimation},
author={Yingda Yin and Yang Wang and He Wang and Baoquan Chen},
booktitle={The Eleventh International Conference on Learning Representations },
year={2023},
url={https://openreview.net/forum?id=Mvetq8DO05O}
}
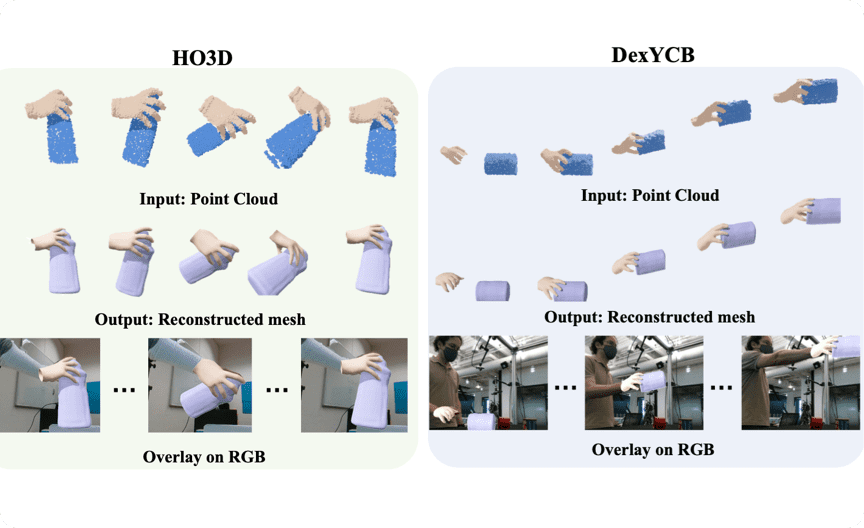
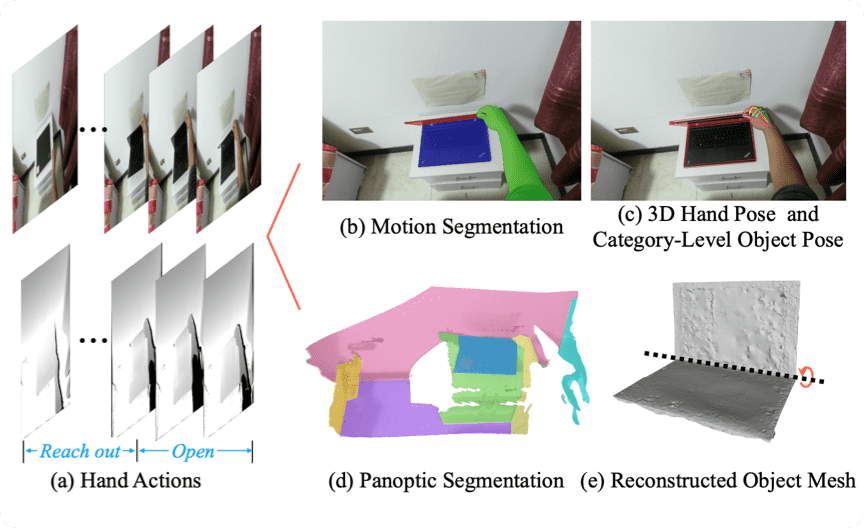
Tracking and Reconstructing Hand Object Interactions from Point
Cloud Sequences in the Wild
Jiayi Chen*, Mi Yan*, Jiazhao Zhang, Yenzhen Xu, Xiaolong Li,
Yijia Weng, Li Yi, Shuran Song,
He Wang†
AAAI 2023 (Oral Presentation)
@article{chen2022tracking,
title={Tracking and Reconstructing Hand Object Interactions from Point Cloud Sequences in the Wild},
author={Chen, Jiayi and Yan, Mi and Zhang, Jiazhao and Xu, Yinzhen and Li, Xiaolong and Weng, Yijia and Yi, Li and Song, Shuran and Wang, He},
journal={arXiv preprint arXiv:2209.12009},
year={2022}
}
ASRO-DIO: Active Subspace Random Optimization Based Depth
Inertial Odometry
Jiazhao Zhang, Yijie Tang,
He Wang, Kai Xu†
IEEE Transactions on Robotics (T-RO)

Domain Randomization-Enhanced Depth Simulation and Restoration
for Perceiving and Grasping Specular and Transparent Objects
Qiyu Dai*, Jiyao Zhang*, Qiwei Li, Tianhao Wu, Hao Dong, Ziyuan
Liu, Ping Tan,
He Wang†
ECCV 2022
@article{dai2022domain,
title={Domain Randomization-Enhanced Depth Simulation and Restoration for Perceiving and Grasping Specular and Transparent Objects},
author={Dai, Qiyu and Zhang, Jiyao and Li, Qiwei and Wu, Tianhao and Dong, Hao and Liu, Ziyuan and Tan, Ping and Wang, He},
journal={arXiv preprint arXiv:2208.03792},
year={2022}
}
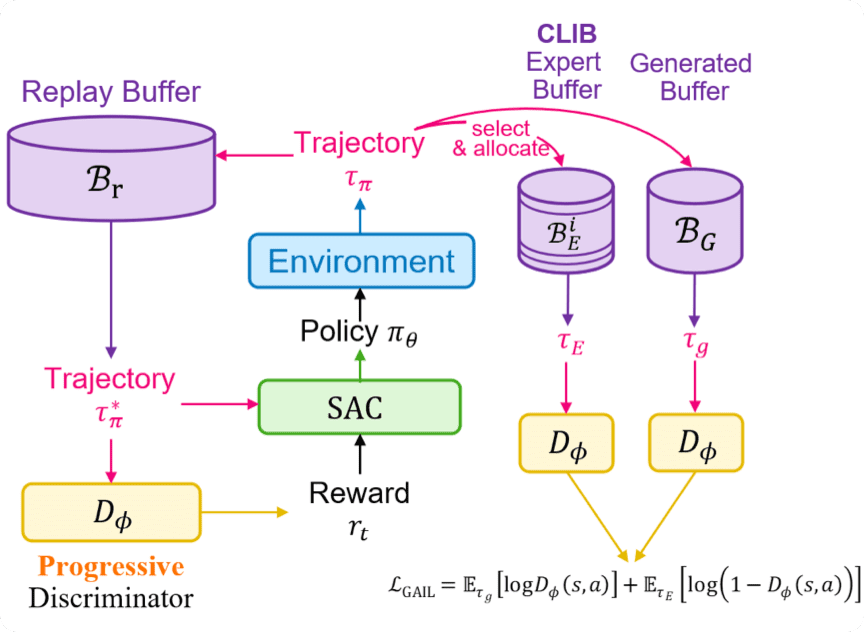
Learning Category-Level Generalizable Object Manipulation Policy
via Generative Adversarial Self-Imitation Learning from
Demonstrations
Hao Shen*, Weikang Wan*,
He Wang†
@article{shen2022learning,
title={Learning Category-Level Generalizable Object Manipulation Policy via Generative Adversarial Self-Imitation Learning from Demonstrations},
author={Shen, Hao and Wan, Weikang and Wang, He},
journal={arXiv preprint arXiv:2203.02107},
year={2022}
}
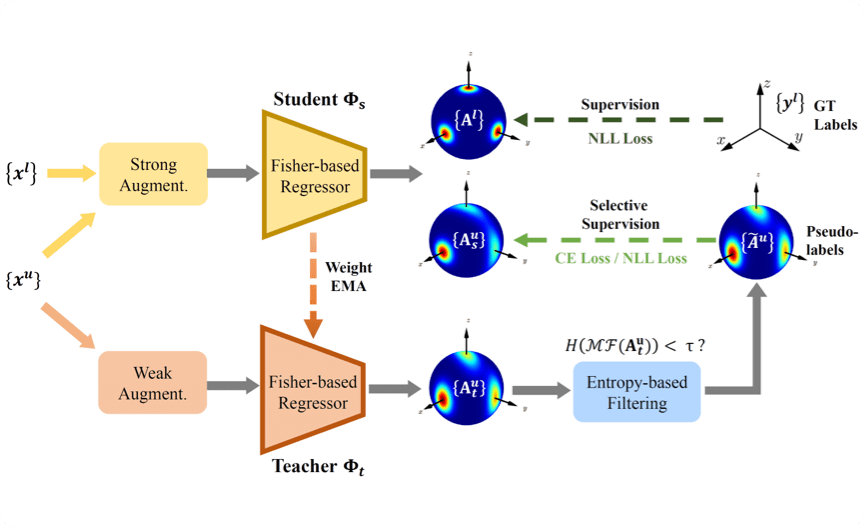
FisherMatch: Semi-Supervised Rotation Regression via
Entropy-based Filtering
Yingda Yin, Yingcheng Cai,
He Wang†, Baoquan Chen†
CVPR 2022 (Oral Presentation)
@article{yin2022fishermatch,
title={FisherMatch: Semi-Supervised Rotation Regression via Entropy-based Filtering},
author={Yin, Yingda and Cai, Yingcheng and Wang, He and Chen, Baoquan},
journal={arXiv preprint arXiv:2203.15765},
year={2022}
}
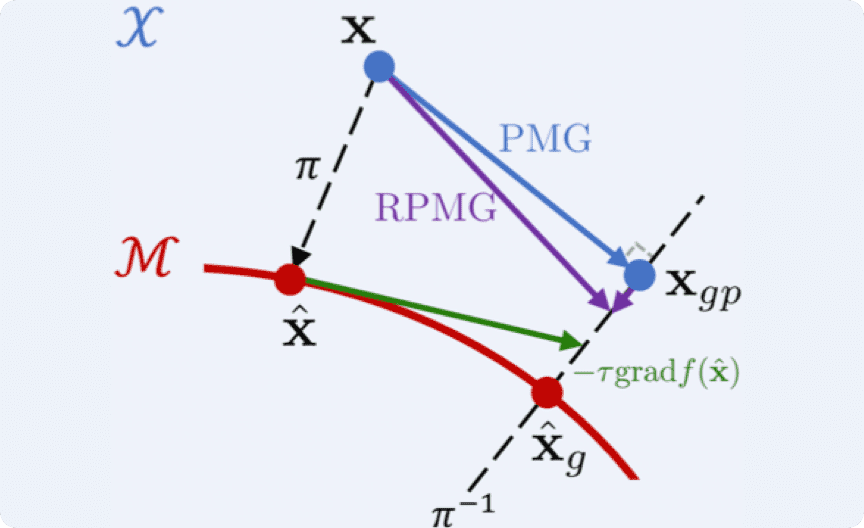
Projective Manifold Gradient Layer for Deep Rotation Regression
Jiayi Chen, Yingda Yin, Tolga Birdal, Baoquan Chen, Leonidas
Guibas,
He Wang†
CVPR 2022
@article{chen2021projective,
title={Projective Manifold Gradient Layer for Deep Rotation Regression},
author={Chen, Jiayi and Yin, Yingda and Birdal, Tolga and Chen, Baoquan and Guibas, Leonidas and Wang, He},
journal={arXiv preprint arXiv:2110.11657},
year={2021}
}
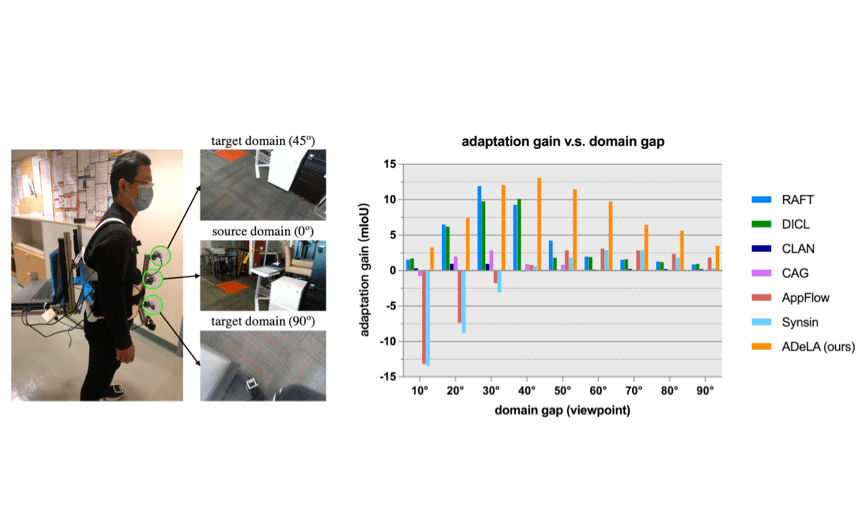
ADeLA: Automatic Dense Labeling with Attention for Viewpoint
Adaptation in Semantic Segmentation
Yanchao Yang*†, Hanxiang Ren*,
He Wang, Bokui Shen, Qingnan Fan, Youyi
Zheng†, C Karen Liu, Leonidas J. Guibas
CVPR 2022 (Oral Presentation)
@article{yang2021adela,
title={ADeLA: Automatic Dense Labeling with Attention for Viewpoint Adaptation in Semantic Segmentation},
author={Yang, Yanchao and Ren, Hanxiang and Wang, He and Shen, Bokui and Fan, Qingnan and Zheng, Youyi and Liu, C Karen and Guibas, Leonidas},
journal={arXiv preprint arXiv:2107.14285},
year={2021}
}
HOI4D: A 4D Egocentric Dataset for Category-Level Human-Object
Interaction
Yunze Liu, Yun Liu, Che Jiang, Kangbo Lyu, Weikang Wan, Hao
Shen, Boqiang Liang, Zhoujie Fu,
He Wang, Li Yi†
CVPR 2022
@article{liu2022hoi4d,
title={HOI4D: A 4D Egocentric Dataset for Category-Level Human-Object Interaction},
author={Liu, Yunze and Liu, Yun and Jiang, Che and Fu, Zhoujie and Lyu, Kangbo and Wan, Weikang and Shen, Hao and Liang, Boqiang and Wang, He and Yi, Li},
journal={arXiv preprint arXiv:2203.01577},
year={2022}
}
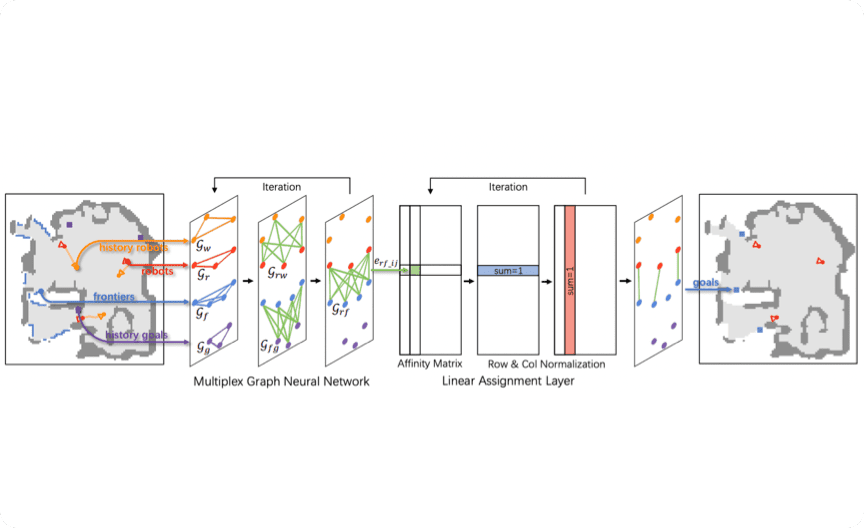
Multi-Robot Active Mapping via Neural Bipartite Graph Matching
Kai Ye*, Siyan Dong*, Qingnan Fan,
He Wang, Li Yi, Fei Xia, Jue Wang, Baoquan Chen
CVPR 2022
@article{ye2022multi,
title={Multi-Robot Active Mapping via Neural Bipartite Graph Matching},
author={Ye, Kai and Dong, Siyan and Fan, Qingnan and Wang, He and Yi, Li and Xia, Fei and Wang, Jue and Chen, Baoquan},
journal={arXiv preprint arXiv:2203.16319},
year={2022}
}
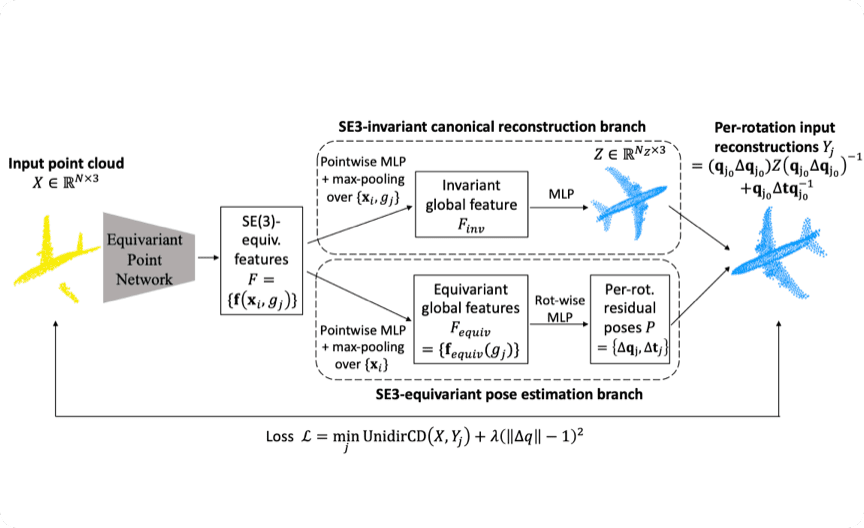
Leveraging SE(3) Equivariance for Self-supervised Category-Level
Object Pose Estimation from Point Clouds
Xiaolong Li, Yijia Weng, Li Yi, Leonidas J. Guibas, A. Lynn
Abbott, Shuran Song,
He Wang†
NeurIPS 21
@article{li2021leveraging,
title={Leveraging SE (3) Equivariance for Self-supervised Category-Level Object Pose Estimation from Point Clouds},
author={Li, Xiaolong and Weng, Yijia and Yi, Li and Guibas, Leonidas J and Abbott, A and Song, Shuran and Wang, He},
journal={Advances in Neural Information Processing Systems},
volume={34},
year={2021}
}
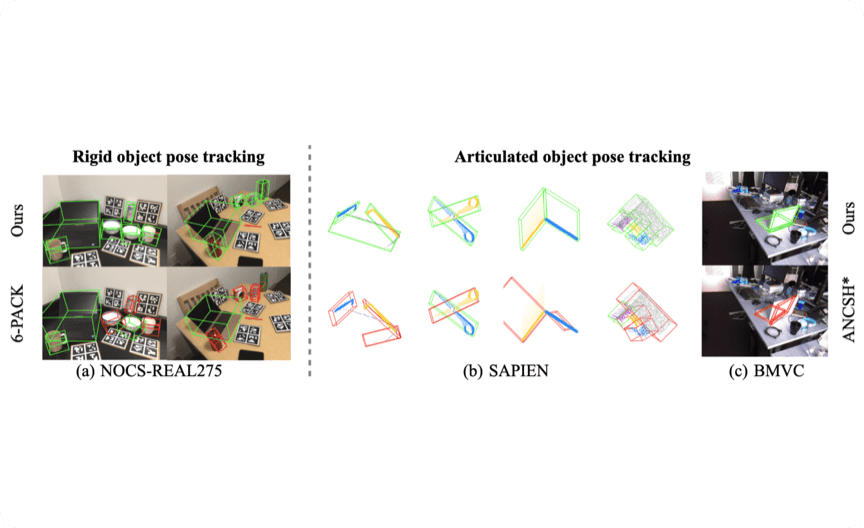
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated
Objects from Point Clouds
Yijia Weng*,
He Wang*†, Qiang Zhou, Yuzhe Qin, Yueqi Duan, Qingnan Fan, Baoquan Chen,
Hao Su, Leonidas J. Guibas
ICCV 2021 (Oral Presentation)
@article{weng2021captra,
title={CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds},
author={Weng, Yijia and Wang, He and Zhou, Qiang and Qin, Yuzhe and Duan, Yueqi and Fan, Qingnan and
Chen, Baoquan and Su, Hao and Guibas, Leonidas J},
journal={arXiv preprint arXiv:2104.03437},
year={2021}
}
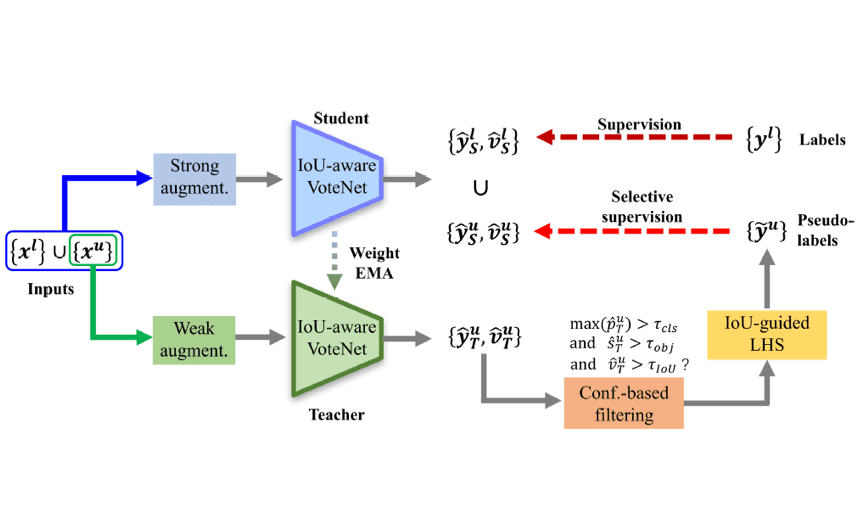
3DIoUMatch: Leveraging IoU Prediction for Semi-Supervised 3D
Object Detection
He Wang*, Yezhen Cong*, Or Litany, Yue Gao, Leonidas J.
Guibas
ICCV 2021
@inproceedings{wang20213dioumatch,
title={3DIoUMatch: Leveraging iou prediction for semi-supervised 3d object detection},
author={Wang, He and Cong, Yezhen and Litany, Or and Gao, Yue and Guibas, Leonidas J},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={14615--14624},
year={2021}
}
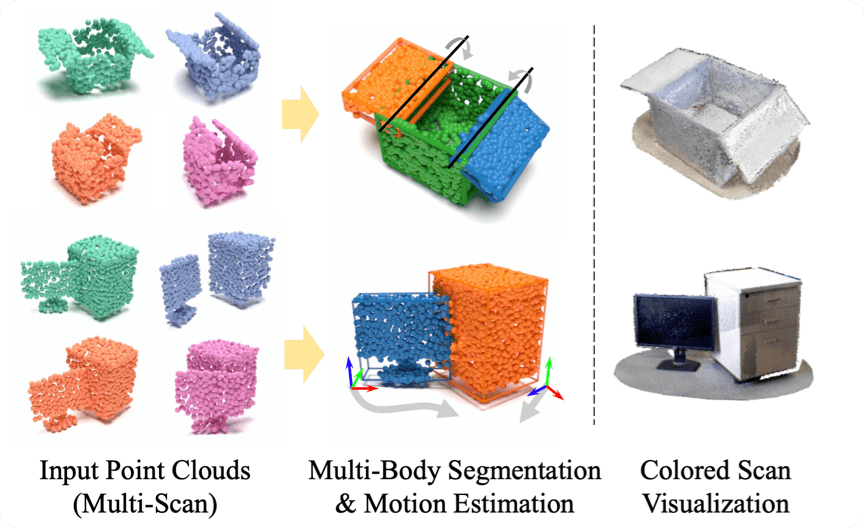
MultiBodySync: Multi-Body Segmentation and Motion Estimation via
3D Scan Synchronization
Jiahui Huang,
He Wang, Tolga Birdal, Minkyuk Sung, Federica Arrigoni,
Shi-Min Hu, Leonidas J. Guibas
CVPR 2021 (Oral Presentation)
@inproceedings{huang2021multibodysync,
title={Multibodysync: Multi-body segmentation and motion estimation via 3d scan synchronization},
author={Huang, Jiahui and Wang, He and Birdal, Tolga and Sung, Minhyuk and Arrigoni, Federica and Hu, Shi-Min and Guibas, Leonidas J},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={7108--7118},
year={2021}
}
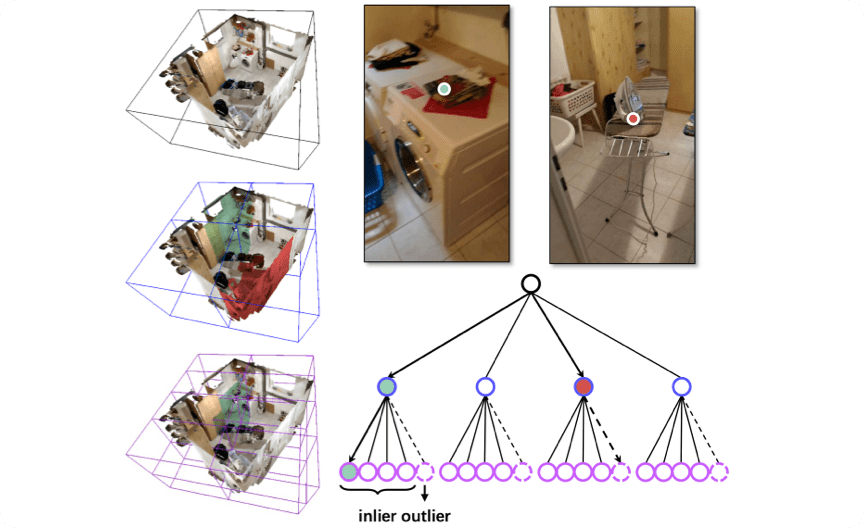
Robust Neural Routing Through Space Partitions for Camera
Relocalization in Dynamic Indoor Environments
Siyan Dong*, Qingnan Fan*,
He Wang, Ji Shi, Li Yi, Thomas Funkhouser, Baoquan Chen,
Leonidas J. Guibas
CVPR 2021 (Oral Presentation)
@InProceedings{Dong_2021_CVPR,
author = {Dong, Siyan and Fan, Qingnan and Wang, He and Shi, Ji and Yi, Li and Funkhouser, Thomas and Chen, Baoquan and Guibas, Leonidas J.},
title = {Robust Neural Routing Through Space Partitions for Camera Relocalization in Dynamic Indoor Environments},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {8544-8554}
}
@misc{duan2020curriculum,
title={Curriculum DeepSDF},
author={Yueqi Duan and Haidong Zhu and He Wang and Li Yi and Ram Nevatia and Leonidas J. Guibas},
year={2020},
eprint={2003.08593},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
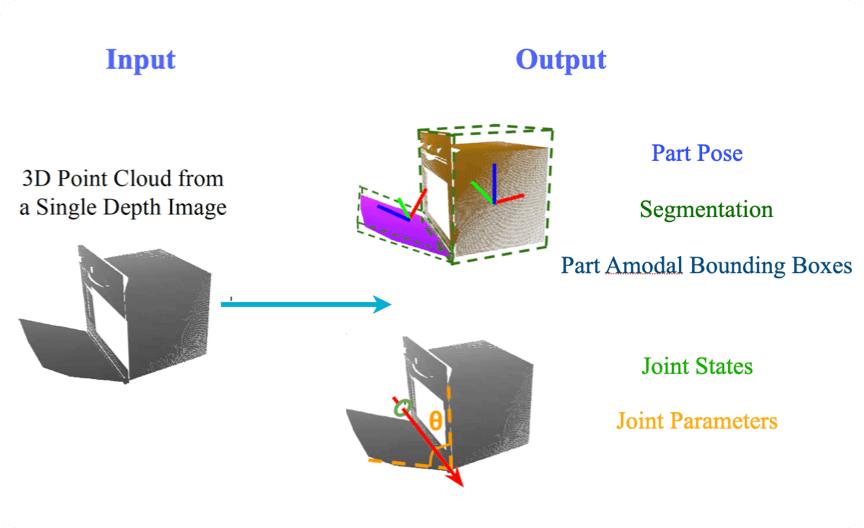
Category-Level Articulated Object Pose Estimation
He Wang*, Xiaolong Li*, Li Yi, Leonidas J. Guibas, A.
Lynn Abbott, Shuran Song†
CVPR 2020 (Oral Presentation)
@article{li2019category,
title={Category-Level Articulated Object Pose Estimation},
author={Li, Xiaolong and Wang, He and Yi, Li and Guibas, Leonidas and Abbott, A Lynn and Song, Shuran},
journal={arXiv preprint arXiv:1912.11913},
year={2019}
}
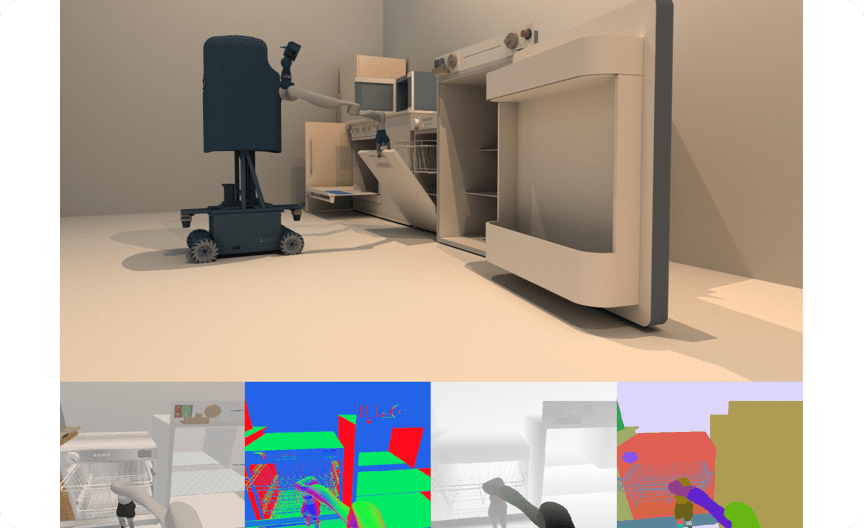
SAPIEN: A SimulAted Part-based Interactive ENvironment
Fanbo Xiang, Yuzhe Qin, Kaichun Mo, Yikuan Xia, Hao Zhu,
Fangchen Liu, Minghua Liu, Hanxiao Jiang, Yifu Yuan,
He Wang, Li Yi, Angel X. Chang, Leonidas J. Guibas, Hao
Su†
CVPR 2020 (Oral Presentation)
@InProceedings{Xiang_2020_SAPIEN,
author={Xiang, Fanbo and Qin, Yuzhe and Mo, Kaichun and Xia, Yikuan and Zhu, Hao
and Liu, Fangchen and Liu, Minghua and Jiang, Hanxiao and Yuan, Yifu
and Wang, He and Yi, Li and Chang, Angel X. and Guibas, Leonidas J. and Su, Hao},
title={SAPIEN: A SimulAted Part-based Interactive ENvironment},
booktitle = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month={June},
year={2020}
}
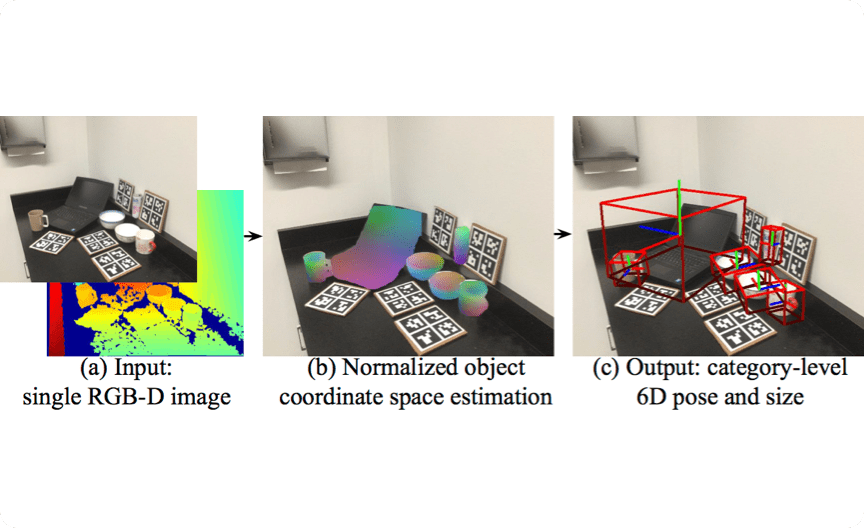
Normalized Object Coordinate Space for Category-Level 6D Object
Pose and Size Estimation
He Wang, Srinath Sridhar, Jingwei Huang, Julien Valentin,
Shuran Song, Leonidas J. Guibas
CVPR 2019 (Oral Presentation),
WAICYOP Award 2022
@inproceedings{wang2019normalized,
title={Normalized object coordinate space for category-level 6d object pose and size estimation},
author={Wang, He and Sridhar, Srinath and Huang, Jingwei and Valentin, Julien and Song, Shuran and Guibas, Leonidas J},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={2642--2651},
year={2019}
}
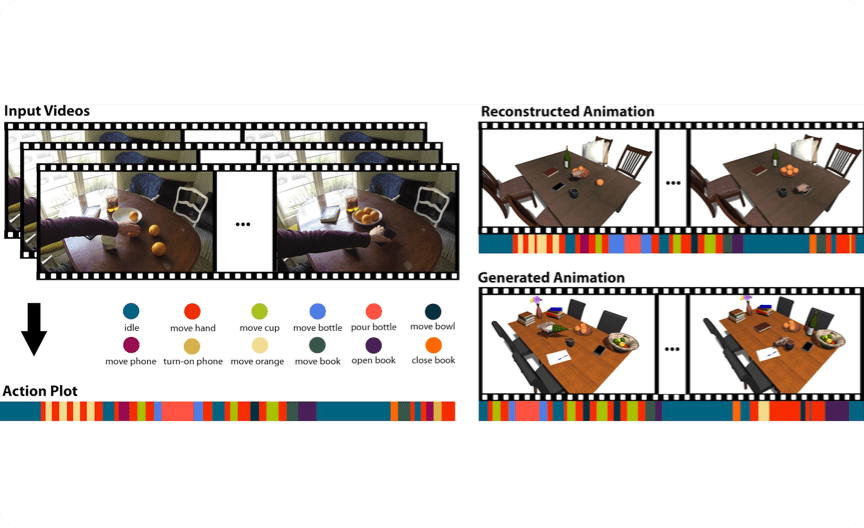
Learning a Generative Model for Multi-Step Human-Object
Interactions from Videos
He Wang*, Soeren Pirk*, Ersin Yumer, Vladimir Kim, Ozan Sener, Srinath
Sridhar, Leonidas J. Guibas
Eurographics 2019 (Best Paper Honorable Mention)