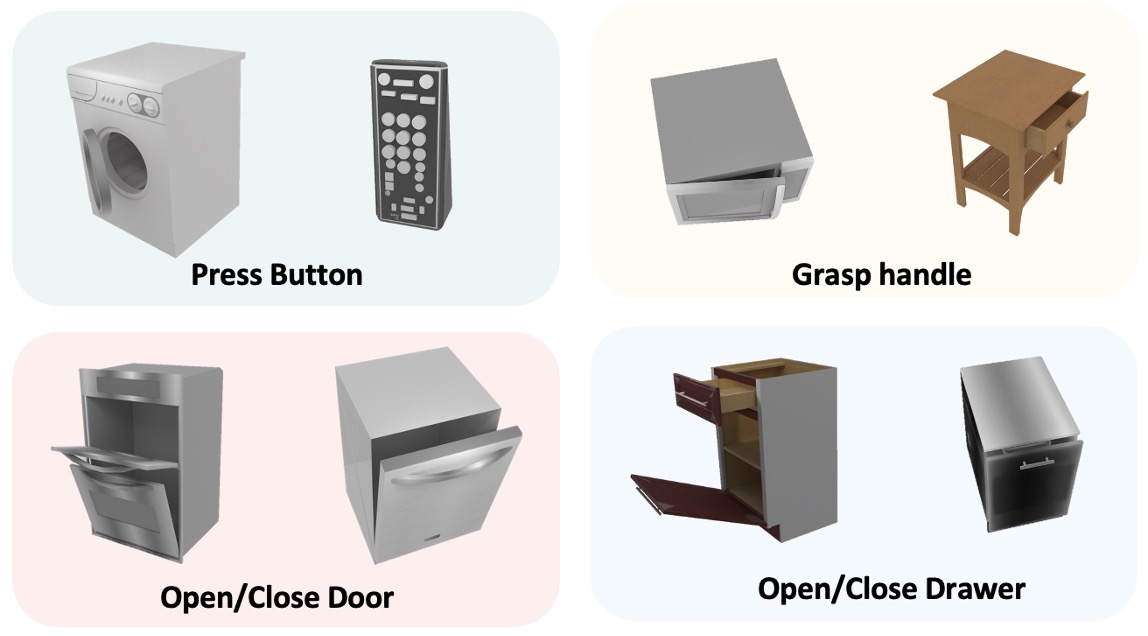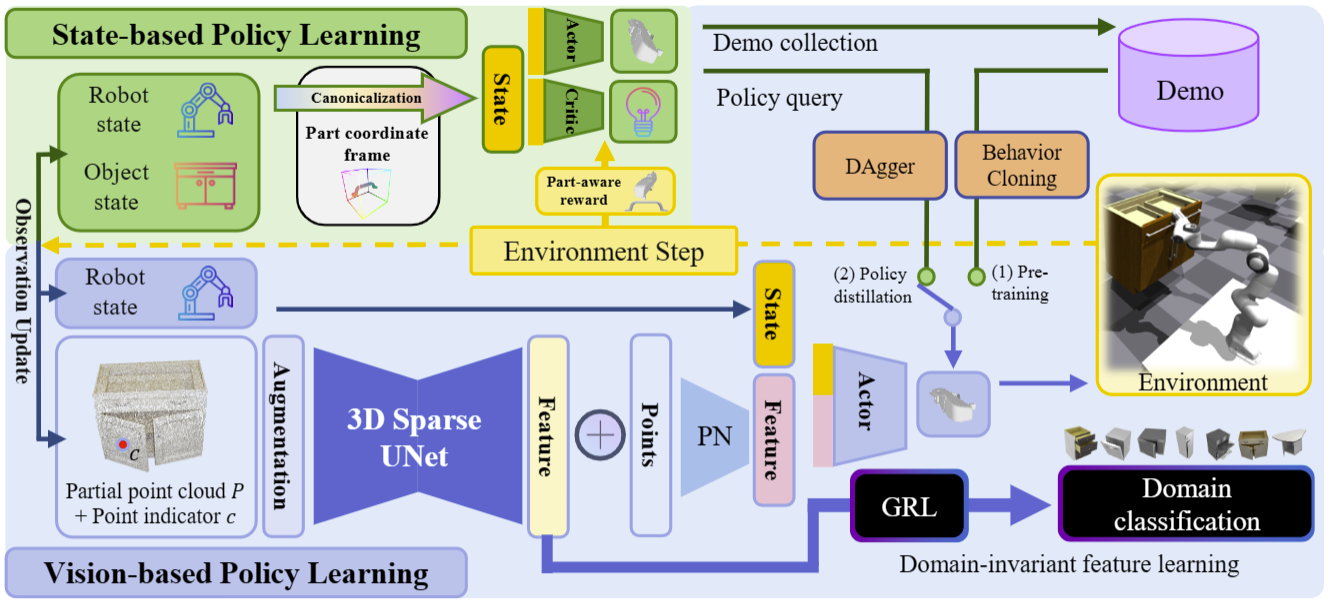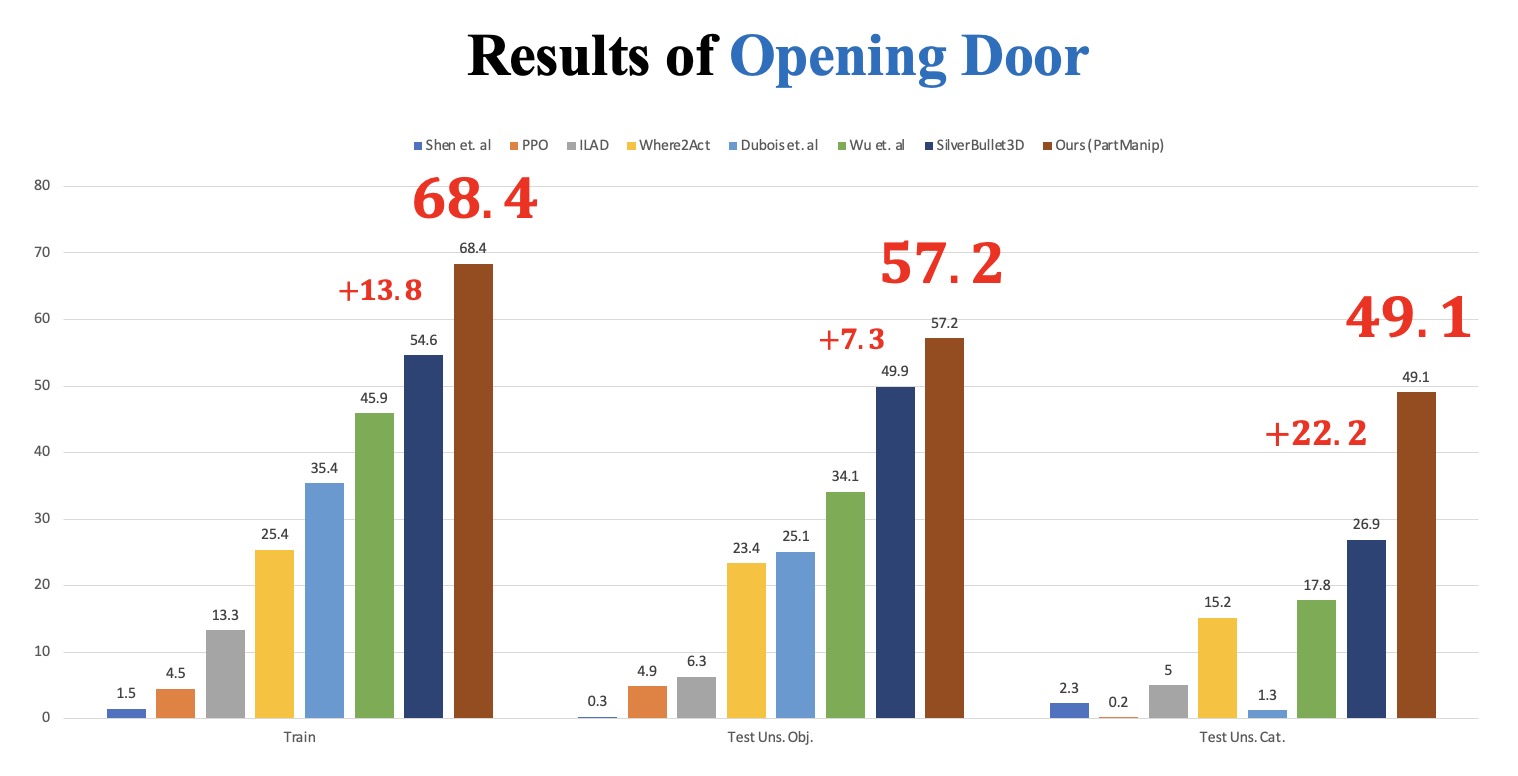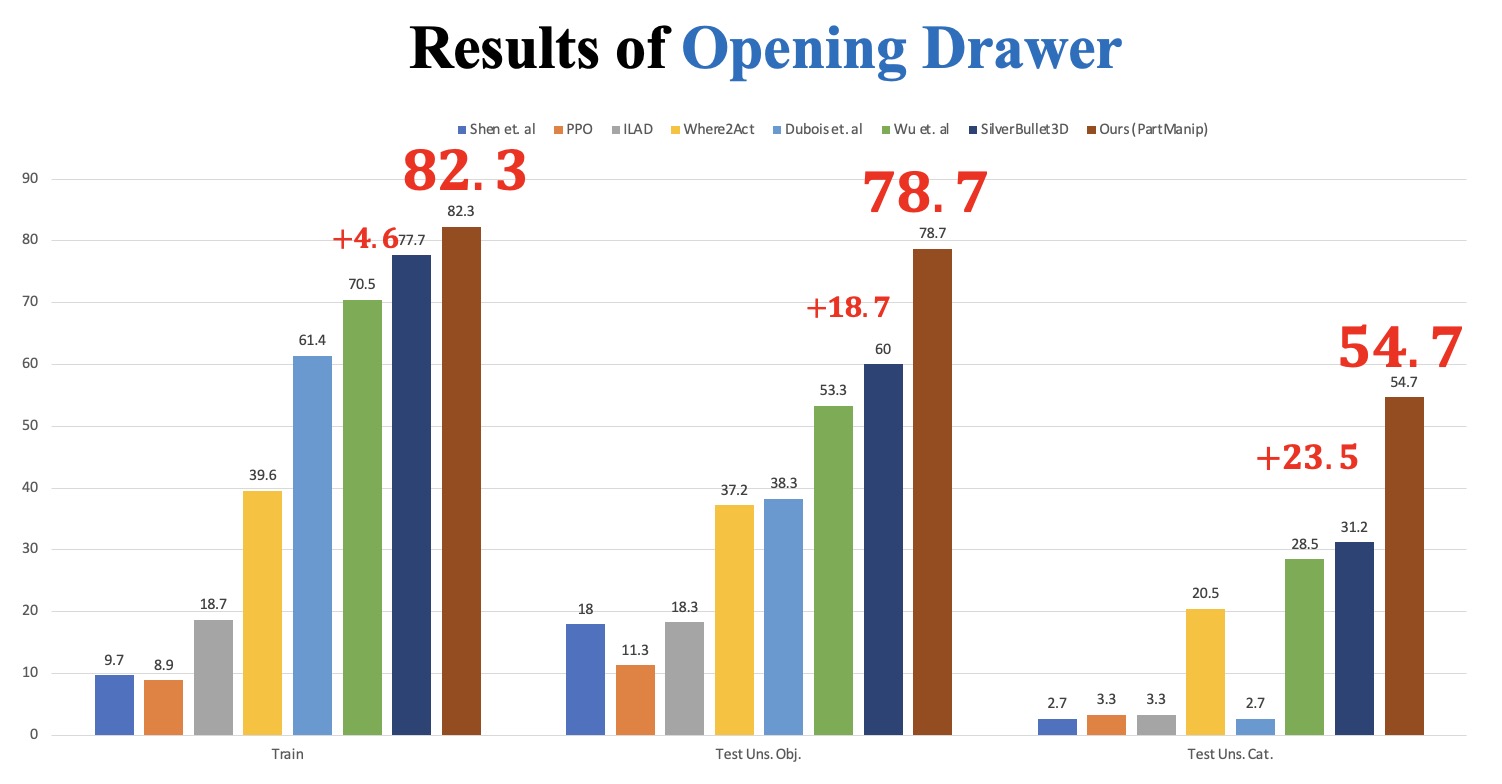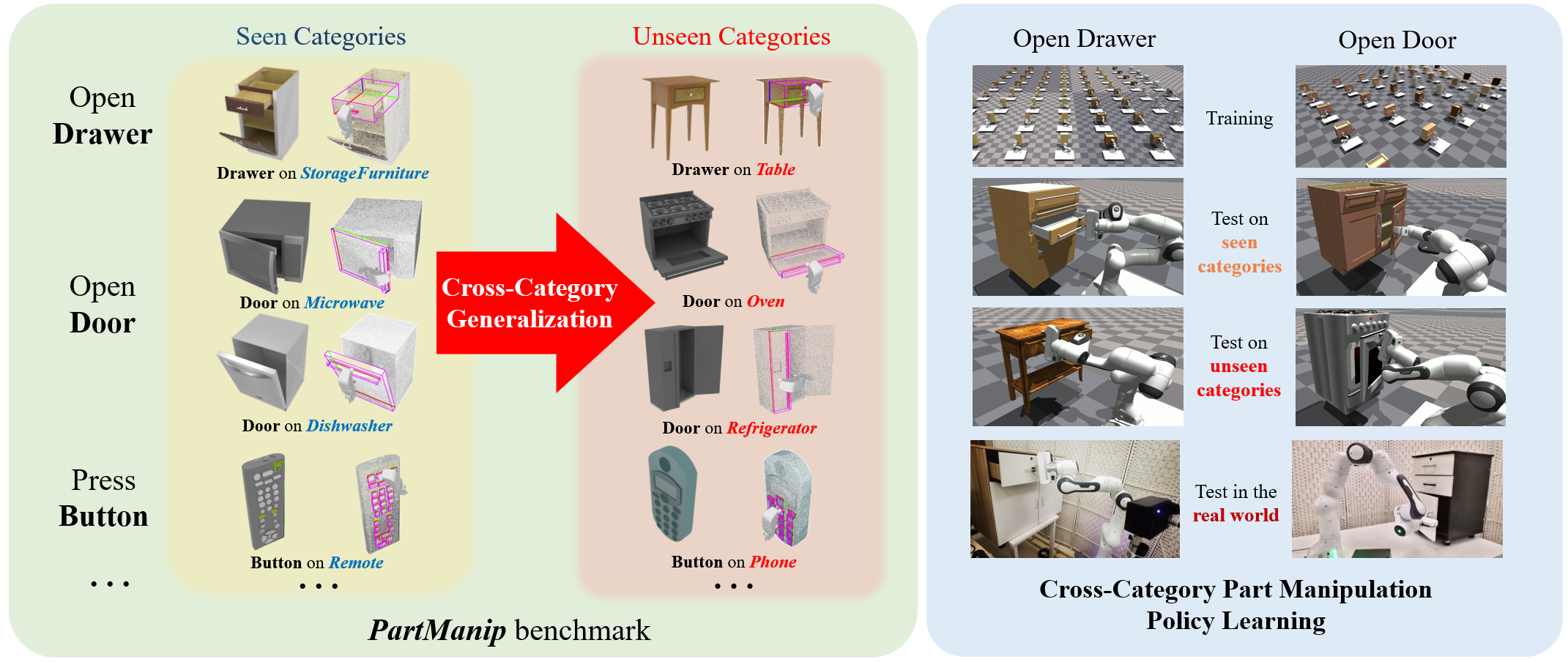
We introduce a large-scale cross-category part manipulation benchmark PartManip with diverse object datasets, realistic settings, and rich annotations. We propose a generalizable vision-based policy learning strategy and boost the performance of part-based object manipulation by a large margin, which can generalize to unseen object categories and novel objects in the real world.